































আবদের রহমান রেজেব a , আলীরেজা আবদুল্লাহি b , করিম রেজেব c , হর্স্ট ট্রেইব্লমায়ার d,
- a ব্যবস্থাপনা ও আইন বিভাগ, অর্থনীতি অনুষদ, রোম বিশ্ববিদ্যালয় টর ভার্গাটা, ভায়া কলম্বিয়া, 2, রোম 00133, ইতালি
- b ব্যবসায় প্রশাসন বিভাগ, ব্যবস্থাপনা অনুষদ, খারাজমি বিশ্ববিদ্যালয়, 1599964511 তেহরান, ইরান
- c বিজার্টের বিজ্ঞান অনুষদ, কার্থেজ বিশ্ববিদ্যালয়, জারজোনা, 7021 বিজার্ট, তিউনিসিয়া
- d স্কুল অফ ইন্টারন্যাশনাল ম্যানেজমেন্ট, মডুল ইউনিভার্সিটি ভিয়েনা, অ্যাম কাহলেনবার্গ 1, 1190 ভিয়েনা, অস্ট্রিয়া
| নিবন্ধ তথ্য | বিমূর্ত |
| মূলশব্দ: ড্রোন UAV যথার্থ কৃষি থিংস ইন্টারনেট বিবলিওমেট্রিক্স | ড্রোন, যাকে মনুষ্যবিহীন এরিয়াল ভেহিকেল (ইউএভি)ও বলা হয়, সাম্প্রতিক দশকগুলিতে একটি উল্লেখযোগ্য উন্নয়ন প্রত্যক্ষ করেছে। কৃষিতে, তারা কৃষকদের যথেষ্ট খরচ সাশ্রয়, বৃদ্ধির প্রস্তাব দিয়ে চাষের পদ্ধতি পরিবর্তন করেছে কর্মক্ষম দক্ষতা, এবং ভাল লাভজনকতা. গত কয়েক দশক ধরে, কৃষি ড্রোনের বিষয় রয়েছে অসাধারণ একাডেমিক মনোযোগ আকর্ষণ করেছে। তাই আমরা বাইবলিওমেট্রিক্সের উপর ভিত্তি করে একটি ব্যাপক পর্যালোচনা পরিচালনা করি বিদ্যমান একাডেমিক সাহিত্যের সংক্ষিপ্তকরণ এবং গঠন করা এবং বর্তমান গবেষণা প্রবণতা এবং হটস্পটগুলি প্রকাশ করা। আমরা বাইবলিওমেট্রিক কৌশল প্রয়োগ করুন এবং কৃষি ড্রোনের আশেপাশের সাহিত্য বিশ্লেষণ করুন সংক্ষিপ্তকরণ এবং পূর্ববর্তী গবেষণা মূল্যায়ন। আমাদের বিশ্লেষণ ইঙ্গিত করে যে রিমোট সেন্সিং, নির্ভুল কৃষি, গভীর শিক্ষা, মেশিন লার্নিং এবং ইন্টারনেট অফ থিংস হল কৃষি ড্রোন সম্পর্কিত গুরুত্বপূর্ণ বিষয়। সহ-উদ্ধৃতি বিশ্লেষণ সাহিত্যে ছয়টি বিস্তৃত গবেষণা ক্লাস্টার প্রকাশ করে। এই গবেষণাটি কৃষিতে ড্রোন গবেষণার সংক্ষিপ্তসার এবং ভবিষ্যতের গবেষণার দিকনির্দেশনা দেওয়ার প্রথম প্রচেষ্টাগুলির মধ্যে একটি। |
ভূমিকা
কৃষি বিশ্বের প্রধান খাদ্য উৎসের প্রতিনিধিত্ব করে (ফ্রিহা এট আল।, 2021), এবং এটির কারণে এটি গুরুতর চ্যালেঞ্জের সম্মুখীন হয়েছে
খাদ্য পণ্যের চাহিদা বৃদ্ধি, খাদ্য নিরাপত্তা এবং নিরাপত্তার উদ্বেগের পাশাপাশি পরিবেশ সুরক্ষা, পানি সংরক্ষণ এবং
স্থায়িত্ব (Inoue, 2020)। 9.7 সালের মধ্যে বিশ্বের জনসংখ্যা 2050 বিলিয়নে পৌঁছাবে বলে অনুমান করা হয়েছে যে এই উন্নয়ন অব্যাহত থাকবে
(2019)। যেহেতু কৃষি বিশ্বব্যাপী জল ব্যবহারের সবচেয়ে বিশিষ্ট উদাহরণ গঠন করে, তাই আশা করা যায় যে খাদ্যের চাহিদা এবং জল
অদূর ভবিষ্যতে খরচ নাটকীয়ভাবে বৃদ্ধি পাবে। এ ছাড়া সার ও কীটনাশকের ব্যবহার বাড়ছে
কৃষি কার্যক্রমের তীব্রতা বৃদ্ধির সাথে সাথে ভবিষ্যতে পরিবেশগত চ্যালেঞ্জ হতে পারে। একইভাবে, আবাদযোগ্য জমি সীমিত, এবং
বিশ্বব্যাপী কৃষকের সংখ্যা কমছে। এই চ্যালেঞ্জগুলি উদ্ভাবনী এবং টেকসই কৃষি সমাধানের প্রয়োজনীয়তার উপর জোর দেয় (Elijah
এট আল।, 2018; ফ্রিহা এট আল।, 2021; Inoue, 2020; Tzounis et al., 2017)।
এই চ্যালেঞ্জ মোকাবেলায় অভিনব প্রযুক্তি অন্তর্ভুক্ত করা একটি প্রতিশ্রুতিশীল সমাধান হিসাবে চিহ্নিত করা হয়েছে। স্মার্ট ফার্মিং (ব্রুস্টার এট আল।,
2017; Tang et al., 2021) এবং নির্ভুল কৃষি (Feng et al., 2019; Khanna & Kaur, 2019) এই ধরনের বিতর্কের ফলস্বরূপ আবির্ভূত হয়েছে। দ্য
প্রাক্তনটি দক্ষতা এবং কার্যকারিতা বৃদ্ধির জন্য তথ্য যোগাযোগ প্রযুক্তি (আইসিটি) এবং কৃষি কার্যক্রমে অন্যান্য অত্যাধুনিক উদ্ভাবন গ্রহণের জন্য একটি সাধারণ ধারণা (হক এট আল।, 2021)। পরবর্তীটি সাইট-নির্দিষ্ট ব্যবস্থাপনার উপর দৃষ্টি নিবদ্ধ করে যেখানে জমি ভাগ করা হয়েছে
সমজাতীয় অংশ, এবং প্রতিটি অংশ অভিনব প্রযুক্তির মাধ্যমে ফসল ফলন অপ্টিমাইজেশানের জন্য সঠিক পরিমাণে কৃষি ইনপুট পায় (ফেং এট আল।, 2019; খান্না ও কৌর, 2019)। এই ক্ষেত্রে পণ্ডিতদের দৃষ্টি আকর্ষণ করেছে এমন বিশিষ্ট প্রযুক্তিগুলির মধ্যে রয়েছে ওয়্যারলেস সেন্সর নেটওয়ার্ক (WSNs) (J. Zheng & Yang, 2018; Y. Zhou et al., 2016), ইন্টারনেট অফ থিংস (IoT) (গিল এট আল।, 2017; He et al., 2021; Liu et al., 2019),
মেশিন লার্নিং এবং ডিপ লার্নিং সহ কৃত্রিম বুদ্ধিমত্তা (AI) কৌশল (লিয়াকোস এট আল।, 2018; পার্সেইন এট আল।, 2020; শাদ্রিন এট আল।,
2019), কম্পিউটিং প্রযুক্তি (Hsu et al., 2020; Jinbo et al., 2019; Zamora-Izquierdo et al., 2019), big data (Gill et al., 2017; Tantalaki
et al., 2019), এবং blockchain (PW Khan et al., 2020; Pincheira et al., 2021)।
উপরে উল্লিখিত প্রযুক্তিগুলি ছাড়াও, দূরবর্তী অনুধাবনকে উন্নত করার উচ্চ সম্ভাবনা সহ একটি প্রযুক্তিগত সরঞ্জাম হিসাবে বিবেচনা করা হয়েছে
স্মার্ট এবং নির্ভুল কৃষি। স্যাটেলাইট, মানব-ক্রুযুক্ত বিমান এবং ড্রোন হল জনপ্রিয় রিমোট সেন্সিং প্রযুক্তি (Tsouros et al., 2019)।
ড্রোন, যা মানহীন এরিয়াল ভেহিকেল (UAVs), Unmanned Aircraft Systems (UAS), এবং দূরবর্তীভাবে চালিত বিমান হিসাবে পরিচিত।
অন্যান্য রিমোট সেন্সিং প্রযুক্তির তুলনায় তাদের একাধিক সুবিধা রয়েছে বলে অত্যন্ত গুরুত্বপূর্ণ। উদাহরণস্বরূপ, ড্রোন সরবরাহ করতে পারে
মেঘলা দিনে উচ্চ-মানের এবং উচ্চ-রেজোলিউশনের ছবি (Manfreda et al., 2018)। এছাড়াও, তাদের প্রাপ্যতা এবং স্থানান্তর গতি অন্য গঠন করে
সুবিধা (Radoglou-Grammatikis et al., 2020)। বিমানের সাথে তুলনা করে, ড্রোনগুলি অত্যন্ত সাশ্রয়ী এবং সেট আপ এবং বজায় রাখা সহজ (Tsouros et al., 2019)। প্রাথমিকভাবে প্রধানত সামরিক উদ্দেশ্যে ব্যবহৃত হওয়া সত্ত্বেও, ড্রোনগুলি অনেক বেসামরিক অ্যাপ্লিকেশনকে উপকৃত করতে পারে, যেমন সাপ্লাই চেইন ম্যানেজমেন্টে (A. Rejeb, Rejeb, et al., 2021a), মানবিক উদ্দেশ্যে (A. Rejeb, Rejeb, et al., 2021c), স্মার্ট এগ্রিকালচার, সার্ভে এবং ম্যাপিং, কালচারাল হেরিটেজ ডকুমেন্টেশন, ডিজাস্টার ম্যানেজমেন্ট, এবং ফরেস্ট অ্যান্ড ওয়াইল্ডলাইফ কনজারভেশন (পান্ডে, প্রতিহাস্ট, এট আল।, 2020)। কৃষিতে, ড্রোনের বহুবিধ প্রয়োগের ক্ষেত্র বিদ্যমান রয়েছে কারণ সেগুলিকে নতুন প্রযুক্তি, কম্পিউটিং ক্ষমতা এবং অনবোর্ড সেন্সরগুলির সাথে শস্য ব্যবস্থাপনার (যেমন, ম্যাপিং, পর্যবেক্ষণ, সেচ, উদ্ভিদ নির্ণয়) সমর্থন করার জন্য একীভূত করা যেতে পারে (H. Huang et al., 2021) , দুর্যোগ হ্রাস, আগাম সতর্কতা ব্যবস্থা, বন্যপ্রাণী এবং বন সংরক্ষণের কয়েকটি নাম (নেগাশ এট আল।, 2019)। একইভাবে, ফসল ও বৃদ্ধি পর্যবেক্ষণ, ফলন অনুমান, জলের চাপের মূল্যায়ন এবং আগাছা, কীটপতঙ্গ এবং রোগ সনাক্তকরণ সহ বিভিন্ন কৃষিকাজে ড্রোন ব্যবহার করা যেতে পারে (Inoue, 2020; Panday, Pratihast, et al., 2020)। ড্রোনগুলি কেবল তাদের সংবেদনশীল ডেটার উপর ভিত্তি করে পর্যবেক্ষণ, অনুমান এবং সনাক্তকরণের উদ্দেশ্যেই ব্যবহার করা যাবে না, তবে নির্ভুল সেচ এবং নির্ভুল আগাছা, কীটপতঙ্গ এবং রোগ ব্যবস্থাপনার জন্যও ব্যবহার করা যেতে পারে। অন্য কথায়, ড্রোন পরিবেশগত তথ্যের উপর ভিত্তি করে সুনির্দিষ্ট পরিমাণে জল এবং কীটনাশক স্প্রে করতে সক্ষম। কৃষিতে ড্রোনের সুবিধাগুলি সারণী 1 এ সংক্ষিপ্ত করা হয়েছে।
কৃষিতে ড্রোনের প্রধান সুবিধা।
| সুবিধা | তথ্যসূত্র(গুলি) |
| সাময়িক এবং স্থানিক উন্নত করুন সংবেদনশীল রেজল্যুশন | (Gago et al., 2015; Niu et al., 2020; শ্রীবাস্তব et al।, 2020) |
| নির্ভুল কৃষি সুবিধা | (L. Deng et al., 2018; Kalischuk et al., 2019; মাইমাইটিজিয়াং এট আল।, 2017) |
| এর শ্রেণীবিভাগ এবং স্কাউটিং ফসল | (Inoue, 2020; Kalischuk et al., 2019; Lopez- ´ Granados et al., 2016; মাইমাইটিজিয়াং এট আল।, 2017; মেলভিল এট আল।, 2019; মোহরানা ও দত্ত, 2016) |
| সারের ব্যবহার | (L. Deng et al., 2018; Guan et al., 2019) |
| খরা পর্যবেক্ষণ | (Fawcett et al., 2020; Panday, Pratihast, et al., 2020; সু এট আল।, 2018) |
| বায়োমাস অনুমান | (Bendig et al., 2014) |
| ফলন অনুমান | (Inoue, 2020; Panday, Srestha, et al., 2020; Tao et al।, 2020) |
| দুর্যোগ হ্রাস | (নেগাশ এট আল।, 2019) |
| বন্যপ্রাণী সংরক্ষণ এবং বনপালনবিদ্যা | (নেগাশ এট আল।, 2019; পান্ডে, প্রতিহাস্ত, এবং অন্যান্য।, 2020) |
| জলের চাপের মূল্যায়ন | (Inoue, 2020; J. Su, Coombes, et al., 2018; L. ঝাং এট আল।, 2019) |
| কীটপতঙ্গ, আগাছা এবং রোগ সনাক্তকরণ | (গাস্পারোভিক এট আল।, 2020; Inoue, 2020; J. Su, Liu, এট আল।, 2018; X. Zhang et al., 2019) |
অন্যদিকে, ড্রোনগুলিও সীমাবদ্ধতার মুখোমুখি। পাইলটের সম্পৃক্ততা, ইঞ্জিনের শক্তি, স্থিতিশীলতা এবং নির্ভরযোগ্যতা, পেলোডের কারণে সেন্সরের গুণমান
ওজন সীমাবদ্ধতা, বাস্তবায়ন খরচ, এবং বিমান চলাচল নিয়ন্ত্রণ, তাদের মধ্যে রয়েছে (C. Zhang & Kovacs, 2012)। আমরা ত্রুটিগুলি তুলনা করি
সারণী 2-এ তিনটি মোবাইল রিমোট সেন্সিং প্রযুক্তির মধ্যে। অন্যান্য রিমোট সেন্সিং প্রযুক্তি, যেমন মাটির সেন্সর, এই গবেষণার ফোকাসের বাইরে।
বিভিন্ন মোবাইল রিমোট সেন্সিং প্রযুক্তির ত্রুটি।
| রিমোট সেন্সিং প্রযুক্তি | ভুলত্রুটি | তথ্যসূত্র |
| ড্রোন (ইউএভি) | পাইলট জড়িত; ছবি' গুণমান (গড়); বাস্তবায়ন খরচ (গড়); স্থিতিশীলতা, চালচলন এবং নির্ভরযোগ্যতা প্রমিতকরণ; ইঞ্জিন ক্ষমতা; সীমিত শক্তি উত্স (ব্যাটারি দীর্ঘায়ু); সীমিত ফ্লাইট সময়কাল, সংঘর্ষ এবং সাইবার আক্রমণ; সীমিত পেলোড ওজন; বড় ডেটাসেট এবং সীমিত ডেটা প্রসেসিং ক্ষমতা; নিয়ন্ত্রণের অভাব; দক্ষতার অভাব, উচ্চ প্রবেশ প্রবেশে বাধা কৃষি ড্রোন; | (বাকো এট আল।, 2018; দাওয়ালিবি et al., 2020; হার্ডিন এবং হার্ডিন, 2010; হার্ডিন এবং জেনসেন, 2011; লগকাস এট আল।, 2018; লালিবার্ট এট আল।, 2007; লালিবার্তে এবং রাঙ্গো, 2011; Manfreda et al., 2018, 2018; নেবিকার এট আল।, 2008; পুরী এট আল।, 2017; ভেলুসামি এট আল।, 2022; সি. ঝাং এবং কোভাকস, 2012) |
| উপগ্রহ | পর্যায়ক্রমিক স্যাটেলাইট কভারেজ, সীমিত বর্ণালী রেজোলিউশন; দৃশ্যমানতার সমস্যাগুলির জন্য দুর্বলতা (যেমন, মেঘ); অনুপলব্ধতা এবং কম স্থানান্তর গতি; অভিযোজন এবং ভিগনেটিং ব্যয়বহুল স্থানিক ডেটাকে প্রভাবিত করে সংগ্রহ; ধীরগতির ডেটা ডেলিভারি শেষ ব্যবহারকারীদের সময় | (Aboutalebi et al., 2019; Cen et al., 2019; চেন এট আল।, 2019; নানসেন এবং এলিয়ট, 2016; পান্ডে, প্রতিহস্ত, et al., 2020; সাই ভিনেথ et al।, 2019) |
| বিমান | উচ্চ দত্তক খরচ; জটিল সেট আপ; রক্ষণাবেক্ষণ খরচ; নির্ভরযোগ্য এর অনুপলব্ধতা বিমান, জ্যামিতি ছবি; অ-নিয়মিত ডেটা অধিগ্রহণ; নমনীয়তার অভাব; মারাত্মক দুর্ঘটনা; সেন্সর ডেটা কম্পনের কারণে বৈচিত্র্য; জিওরেফারেন্সিং সমস্যা | (আর্মস্ট্রং এট আল।, 2011; অ্যাটকিনসন এট আল।, 2018; বারবেডো এবং কোয়েনিগকান, 2018; কোভালেভ এবং ভোরোশিলোভা, 2020; সুওমালাইনেন এট আল।, 2013; Thamm et al., 2013) |
কৃষিতে একটি বহুমুখী এবং বহুমুখী প্রযুক্তি হিসাবে, ড্রোনকে বিভিন্ন দৃষ্টিকোণ থেকে তদন্ত করা হয়েছে। উদাহরণস্বরূপ, পণ্ডিতরা কৃষিতে ড্রোন অ্যাপ্লিকেশন পরীক্ষা করেছেন (কুলবাকি এট আল।, 2018; মোগিলি এবং দীপক, 2018), নির্ভুল কৃষিতে তাদের অবদান (পুরি এট আল।, 2017; টোরোস এট আল।, 2019), অন্যান্যদের সাথে তাদের পরিপূরকতা অত্যাধুনিক প্রযুক্তি (আল-থানি এট আল।, 2020; দত্ত ও মিত্র, 2021; নায়ার এট আল।, 2020; সাহা এট আল।, 2018), এবং তাদের ন্যাভিগেশনাল এবং সেন্সিং ক্ষমতাকে এগিয়ে নেওয়ার সম্ভাবনা (বারেথ আল। , 2015; সুওমালাইনেন এট আল।, 2014)। যেহেতু কৃষিতে ড্রোন প্রয়োগের উপর গবেষণা প্রচলিত হয়ে উঠেছে (খান এট আল।, 2021)), বিদ্যমান সাহিত্যের সংক্ষিপ্তসার এবং ডোমেনের বুদ্ধিবৃত্তিক কাঠামো প্রকাশ করার প্রয়োজন রয়েছে। তদুপরি, ক্রমাগত উন্নতি সহ একটি উচ্চ-প্রযুক্তি ক্ষেত্র হিসাবে, বিদ্যমান সাহিত্যের সংক্ষিপ্তসার এবং গুরুত্বপূর্ণ গবেষণার ফাঁকগুলি চিহ্নিত করার জন্য পর্যায়ক্রমে কাঠামোগত পর্যালোচনাগুলি পরিচালনা করা প্রয়োজন। প্রতি
তারিখে, কিছু পর্যালোচনা রয়েছে যা কৃষি খাতে ড্রোন অ্যাপ্লিকেশন নিয়ে আলোচনা করে। উদাহরণস্বরূপ, মোগিলি এবং দীপক (2018) শস্য পর্যবেক্ষণ এবং কীটনাশক স্প্রে করার জন্য সংক্ষিপ্তভাবে ড্রোনের প্রভাব পর্যালোচনা করে। Inoue (2020) কৃষিতে রিমোট সেন্সিংয়ে স্যাটেলাইট এবং ড্রোন ব্যবহারের একটি পর্যালোচনা পরিচালনা করে। লেখক স্মার্ট ফার্মিং গ্রহণের প্রযুক্তিগত চ্যালেঞ্জ এবং কেস স্টাডি এবং সর্বোত্তম অনুশীলনের উপর ভিত্তি করে স্যাটেলাইট এবং ড্রোনের অবদানগুলি অন্বেষণ করেছেন। Tsouros et al. (2019) বিভিন্ন ধরণের ড্রোন এবং কৃষিতে তাদের প্রধান অ্যাপ্লিকেশনগুলির সংক্ষিপ্তসার, বিভিন্ন ডেটা অধিগ্রহণ এবং প্রক্রিয়াকরণের পদ্ধতিগুলি হাইলাইট করে। অতি সম্প্রতি, আসলান এট আল। (2022) কৃষি কার্যক্রমে UAV অ্যাপ্লিকেশনগুলির একটি বিস্তৃত পর্যালোচনা পরিচালনা করেছে এবং গ্রিনহাউসে UAV-এর জন্য যুগপত স্থানীয়করণ এবং ম্যাপিংয়ের প্রাসঙ্গিকতাকে আন্ডারস্কোর করেছে। দিয়াজ-গঞ্জালেজ এবং অন্যান্য। (2022) বিভিন্ন মেশিন লার্নিং কৌশল এবং রিমোটের উপর ভিত্তি করে ফসলের ফলন উৎপাদনের সাম্প্রতিক গবেষণা পর্যালোচনা করেছে
সেন্সিং সিস্টেম। তাদের অনুসন্ধানগুলি ইঙ্গিত করে যে UAV গুলি মাটির সূচকগুলি অনুমান করতে এবং স্থানিক রেজোলিউশন, তথ্য সাময়িকতা এবং নমনীয়তার ক্ষেত্রে স্যাটেলাইট সিস্টেমগুলিকে ছাড়িয়ে যেতে কার্যকর। বাসিরি এট আল। (2022) নির্ভুল কৃষির প্রেক্ষাপটে মাল্টি-রটার ইউএভি-র জন্য পাথ-প্ল্যানিং চ্যালেঞ্জগুলি কাটিয়ে উঠতে বিভিন্ন পন্থা এবং পদ্ধতিগুলির একটি সম্পূর্ণ পর্যালোচনা করেছে। তাছাড়া, আওয়াইস প্রমুখ। (2022) জলের অবস্থা অনুমান করার জন্য ফসলে UAV রিমোট সেন্সিং ডেটার প্রয়োগের সংক্ষিপ্তসার এবং বর্জ্য চাপ প্রয়োগের জন্য UAV রিমোট সেন্সিং এর সম্ভাব্য ক্ষমতার একটি গভীর সংশ্লেষণ প্রদান করেছে। অবশেষে, আকুইলানি এট আল। (2022) চারণভূমি ভিত্তিক পশুসম্পদ ব্যবস্থায় প্রয়োগ করা পূর্বনির্ধারিত কৃষি প্রযুক্তির পর্যালোচনা করা হয়েছে এবং অনুমান করা হয়েছে যে UAVs দ্বারা সক্ষম রিমোট সেন্সিং বায়োমাস মূল্যায়ন এবং পশুপালন ব্যবস্থাপনার জন্য সুবিধাজনক।
এছাড়াও, পশুসম্পদ পর্যবেক্ষণ, ট্র্যাকিং এবং সংগ্রহে UAV ব্যবহার করার প্রচেষ্টা সম্প্রতি রিপোর্ট করা হয়েছে।
যদিও এই পর্যালোচনাগুলি নতুন এবং গুরুত্বপূর্ণ অন্তর্দৃষ্টি দেয়, তবে বিবলিওমেট্রিক্সের উপর ভিত্তি করে কোনও ব্যাপক এবং আপ-টু-ডেট পর্যালোচনা সাহিত্যে পাওয়া যায় না, যা একটি পরিষ্কার জ্ঞানের ব্যবধান উপস্থাপন করে। অধিকন্তু, এটি বলা হয়েছে যে যখন একটি বৈজ্ঞানিক ডোমেনে পাণ্ডিত্যপূর্ণ উত্পাদন বৃদ্ধি পায়, তখন গবেষকদের জন্য ডোমেনের জ্ঞান কাঠামো বোঝার জন্য পরিমাণগত পর্যালোচনা পদ্ধতি নিয়োগ করা অত্যাবশ্যক হয়ে ওঠে (Rivera & Pizam, 2015)। একইভাবে, ফেরেরা এট আল। (2014) যুক্তি দিয়েছিলেন যে গবেষণার ক্ষেত্রগুলি পরিপক্ক এবং জটিল হয়ে উঠলে, পণ্ডিতদের লক্ষ্য করা উচিত মাঝে মাঝে নতুন অবদান প্রকাশ করতে, গবেষণার ঐতিহ্য এবং প্রবণতাগুলি ক্যাপচার করতে, কোন বিষয়গুলি অধ্যয়ন করা হয় শনাক্ত করতে এবং জ্ঞানের কাঠামোর মধ্যে অনুসন্ধান করার জন্য উত্পন্ন এবং সঞ্চিত জ্ঞানের উপলব্ধি করা। ক্ষেত্র এবং সম্ভাব্য গবেষণা দিকনির্দেশ। যখন Raparelli এবং Bajocco (2019) কৃষি এবং বনবিদ্যায় ড্রোন অ্যাপ্লিকেশনের জ্ঞানের ডোমেন পরীক্ষা করার জন্য একটি বাইবলিওমেট্রিক বিশ্লেষণ পরিচালনা করেছে, তাদের অধ্যয়ন শুধুমাত্র 1995 এবং 2017 এর মধ্যে প্রকাশিত পণ্ডিত গবেষণা বিবেচনা করে, যা এই দ্রুত-চলমান এলাকার গতিশীলতাকে প্রতিফলিত করে না। আরও, লেখকরা ক্ষেত্রের সবচেয়ে প্রভাবশালী অবদানগুলি চিহ্নিত করার, সাহিত্যকে ক্লাস্টার করার এবং সহ-উদ্ধৃতি বিশ্লেষণ ব্যবহার করে বৌদ্ধিক কাঠামোর মূল্যায়ন করার চেষ্টা করেননি। ফলস্বরূপ, বর্তমান গবেষণা কেন্দ্র, প্রবণতা এবং হটস্পটগুলি প্রকাশ করার জন্য সাহিত্যের সংক্ষিপ্তসার করা প্রয়োজন।
এই জ্ঞানের শূন্যতা পূরণ করার জন্য, আমরা ড্রোন এবং কৃষির সংযোগস্থলে গবেষণার বর্তমান অবস্থা পরীক্ষা করার জন্য পরিমাণগত পদ্ধতি এবং কঠোর বাইবলিওমেট্রিক পদ্ধতিগুলি ব্যবহার করি। আমরা যুক্তি দিই যে বর্তমান অধ্যয়নটি একটি উদীয়মান প্রযুক্তি পরীক্ষা করে বিদ্যমান সাহিত্যে বেশ কিছু অবদান রাখে যা কৃষিতে অত্যন্ত প্রয়োজনীয় কারণ এটি এই সেক্টরে বিভিন্ন দিক পরিবর্তন করার অসাধারণ সম্ভাবনা প্রদান করে। কৃষি প্রেক্ষাপটের মধ্যে ড্রোন সম্পর্কে বিক্ষিপ্ত এবং খণ্ডিত জ্ঞানের কারণে কৃষি ড্রোনগুলির একটি বিবলিওমেট্রিক বিশ্লেষণের প্রয়োজনীয়তা আরও বেশি অনুভূত হয়। একইভাবে, কৃষি ড্রোন সম্পর্কিত সাহিত্যগুলিকে পদ্ধতিগতভাবে ক্লাস্টার করা প্রয়োজন, সবচেয়ে প্রভাবশালী অধ্যয়নগুলি বিবেচনা করে যা এই গবেষণা ক্ষেত্রের ভিত্তি তৈরি করে। বিশ্লেষণের যোগ্যতা সাহিত্যে উপস্থাপিত প্রধান গবেষণা থিমগুলির ব্যাখ্যাও অন্তর্ভুক্ত করে। প্রযুক্তির রূপান্তরের সম্ভাবনা বিবেচনা করে, আমরা মনে করি যে একটি গভীর নেটওয়ার্ক বিশ্লেষণ প্রভাবশালী কাজগুলি নির্ধারণ করে এবং ড্রোনের কৃষির সম্ভাবনা সম্পর্কিত থিমগুলি প্রকাশ করে অভিনব অন্তর্দৃষ্টি দেয়৷
তাই আমরা নিম্নলিখিত গবেষণা উদ্দেশ্যগুলি অর্জন করার চেষ্টা করি:
- কৃষিক্ষেত্রে ড্রোন অ্যাপ্লিকেশনগুলিতে অসামান্য অবদান সহ প্রভাবশালী প্রকাশনাগুলির সনাক্তকরণ।
- সহ-উদ্ধৃতি বিশ্লেষণ ব্যবহার করে শব্দার্থগত মিলের উপর ভিত্তি করে সাহিত্যের ক্লাস্টারিং, গবেষণা কেন্দ্রের সনাক্তকরণ এবং মূল 'বুদ্ধিবৃত্তিক কাঠামো' অধ্যয়নের ম্যাপিং।
- ক্ষেত্রের বিভিন্ন প্রকাশনার মধ্যে সময়ের সাথে সাথে সংযোগ এবং উদ্ধৃতি নেটওয়ার্কগুলির বিবর্তন সম্পর্কে বোঝা এবং ভবিষ্যতের গবেষণার দিকনির্দেশ এবং আলোচিত বিষয়গুলির সনাক্তকরণ।
বাকি কাগজটি নিম্নরূপ গঠন করা হয়েছে: বিভাগ 2 পদ্ধতি এবং তথ্য সংগ্রহের ধাপগুলিকে রূপরেখা দেয়; বিভাগ 3 বিশ্লেষণের ফলাফল প্রদান করে; এবং বিভাগ 4 ফলাফলগুলি নিয়ে আলোচনা করে এবং গবেষণার অবদান, প্রভাব এবং ভবিষ্যত দিকনির্দেশগুলির সাথে শেষ করে৷
প্রণালী বিজ্ঞান
এই বর্তমান গবেষণা অধ্যয়নে, আমরা কৃষিতে ড্রোন অ্যাপ্লিকেশনগুলি অন্বেষণ করার জন্য একটি বিবলিওমেট্রিক বিশ্লেষণ পরিচালনা করি। এই পরিমাণগত পদ্ধতি জ্ঞান ডোমেনের বৌদ্ধিক কাঠামো প্রকাশ করে (Arora & Chakraborty, 2021) এবং বর্তমান অবস্থা, আলোচিত বিষয় এবং ভবিষ্যতের গবেষণার দিকনির্দেশ যা এই পদ্ধতি প্রয়োগ করে তদন্ত করা যেতে পারে (কাপুর এট আল।, 2018; মিশ্র এট আল। , 2017; A. Rejeb, Rejeb, et al., 2021b; A. Rejeb et al., 2021d; MA Rejeb et al., 2020)। সাধারণত, একটি বাইবলিওমেট্রিক বিশ্লেষণ বর্তমান সাহিত্যকে পরিসংখ্যান এবং গাণিতিক পদ্ধতির উপর ভিত্তি করে লিখিত যোগাযোগের লুকানো নিদর্শন এবং শৃঙ্খলার বিবর্তনের সংক্ষিপ্তসার এবং উন্মোচন করার জন্য পরীক্ষা করে এবং এটি বড় ডেটা সেটের ক্ষেত্রে প্রযোজ্য (প্রিচার্ড, 1969; ছোট, 1999; তাহাই এবং রিগসবাই , 1998)। বিবলিওমেট্রিক্স ব্যবহার করে, আমরা বিদ্যমান দৃষ্টান্ত এবং গবেষণা কেন্দ্রগুলিকে আরও ভালভাবে বোঝার আকাঙ্ক্ষা করি যা সাদৃশ্যের উপর ভিত্তি করে ডোমেনে অবদান রাখে (Thelwall, 2008)। বিবলিওমেট্রিক্স পদ্ধতির উদ্দেশ্যগত পরিমাণগত শক্তি দ্বারা সমর্থিত নতুন অন্তর্দৃষ্টি প্রদান করে (ক্যাসিলাস এবং অ্যাসেডো, 2007)। অনেক পণ্ডিত পূর্বে কৃষি, রিমোট সেন্সিং এবং ডিজিটাল ট্রান্সফরমেশন সহ সম্পর্কিত ডোমেনে বাইবলিওমেট্রিক অধ্যয়ন পরিচালনা করেছেন (আর্মেন্টা-মেডিনা এট আল।, 2020; বুজেমব্রাক এট আল।, 2019; এ. রেজেব, ট্রেইব্লমাইয়ার, এট আল।, 2021 & Queiroz, 2021; Wang et al., 2019)।
উদ্ধৃতি বিশ্লেষণ
উদ্ধৃতি বিশ্লেষণ একটি প্রদত্ত গবেষণা ক্ষেত্রের বিভিন্ন অন্তর্দৃষ্টি প্রকাশ করে। প্রথমত, এটি সবচেয়ে প্রভাবশালী লেখক এবং প্রকাশনাগুলি প্রকাশ করতে সাহায্য করে যা একটি প্রদত্ত গবেষণা ক্ষেত্রে অবদান রাখে এবং একটি উল্লেখযোগ্য প্রভাব ফেলে (Gundolf & Filser, 2013)। দ্বিতীয়ত, জ্ঞান প্রবাহ এবং লেখকদের মধ্যে যোগাযোগের লিঙ্কগুলি উন্মোচিত করা যেতে পারে। অবশেষে, উদ্ধৃত এবং উদ্ধৃত কাজের মধ্যে লিঙ্কগুলিকে ট্রেস করে, কেউ সময়ের সাথে সাথে একটি জ্ঞান ডোমেনের পরিবর্তন এবং বিবর্তন অন্বেষণ করতে পারে (পুরনাডার
এট আল।, 2020)। একটি প্রকাশনার উচ্চ উদ্ধৃতি সংখ্যা তার প্রাসঙ্গিকতা এবং গবেষণা ডোমেনে যথেষ্ট অবদান প্রতিফলিত করে (বাল্ডি, 1998; গুন্ডলফ এবং ফিলসার, 2013; মারিঙ্কো, 1998)। প্রকাশনাগুলির উদ্ধৃতি বিশ্লেষণ প্রাসঙ্গিক কাজগুলি সনাক্ত করতে এবং সময়ের সাথে তাদের জনপ্রিয়তা এবং অগ্রগতি ট্র্যাক করতে সহায়তা করে।
নথির সহ-উদ্ধৃতি বিশ্লেষণ
সহ-উদ্ধৃতি বিশ্লেষণ হল প্রকাশনাগুলির মধ্যে সম্পর্ক অন্বেষণ করার এবং একটি ক্ষেত্রের বৌদ্ধিক কাঠামো চিত্রিত করার জন্য একটি মূল্যবান পদ্ধতি (Nerur et al., 2008)। অন্য কথায়, সর্বাধিক উদ্ধৃত প্রকাশনা এবং তাদের সংযোগগুলি সনাক্ত করে, পদ্ধতিটি প্রকাশনাগুলিকে পৃথক গবেষণা ক্লাস্টারে গোষ্ঠীভুক্ত করে যেখানে একটি ক্লাস্টারের প্রকাশনাগুলি নিয়মিত একই রকম ধারণা ভাগ করে নেয় (McCain, 1990; Small, 1973)। এটা উল্লেখ করা গুরুত্বপূর্ণ যে মিলের অর্থ এই নয় যে প্রকাশনাগুলির ফলাফলগুলি
সমন্বিত এবং একে অপরের সাথে একমত; বিষয়ের সাদৃশ্যের কারণে প্রকাশনাগুলি একই ক্লাস্টারের অন্তর্গত, তবে তাদের বিপরীত দৃষ্টিভঙ্গি থাকতে পারে।
তথ্য সংগ্রহ এবং বিশ্লেষণ
হোয়াইট এবং গ্রিফিথ (1981) দ্বারা প্রস্তাবিত পদ্ধতি অনুসরণ করে, আমরা নিম্নলিখিত পাঁচটি ধাপ অনুসরণ করে কৃষিতে ড্রোন অ্যাপ্লিকেশনগুলির সম্পূর্ণ গবেষণা ডোমেন কভার করার জন্য জার্নাল নিবন্ধগুলির একটি ব্যাপক অনুসন্ধান করেছি:
- প্রথম ধাপ ছিল তথ্য সংগ্রহ। স্কোপাসকে প্রমিত ফলাফল সহ সবচেয়ে ব্যাপক এবং বিশ্বস্ত ডেটাবেসগুলির মধ্যে একটি হিসাবে নির্বাচিত করা হয়েছিল। কৃষিতে সমস্ত ড্রোন অ্যাপ্লিকেশন সম্পর্কিত প্রকাশনার মেটা-ডেটা পুনরুদ্ধার করা হয়েছিল। তারপরে আমরা নির্বাচিত নিবন্ধগুলি বিশ্লেষণ করেছি, বিশ্লেষণ থেকে অফ-টপিক নিবন্ধগুলি সরিয়েছি।
- আমরা সাহিত্য বিশ্লেষণ করেছি এবং গবেষণা এলাকায় ব্যবহৃত সবচেয়ে গুরুত্বপূর্ণ কীওয়ার্ডগুলি চিহ্নিত করেছি।
- উদ্ধৃতি বিশ্লেষণ ব্যবহার করে, আমরা অন্তর্নিহিত উদ্ধৃতি নিদর্শনগুলি প্রকাশ করতে লেখক এবং নথির মধ্যে সংযোগ অন্বেষণ করেছি। আমরা কৃষি ড্রোনের ক্ষেত্রে উল্লেখযোগ্য অবদানের সাথে সবচেয়ে প্রভাবশালী লেখক এবং প্রকাশনাগুলিকেও চিহ্নিত করেছি।
- আমরা ক্লাস্টারে অনুরূপ প্রকাশনাগুলিকে গোষ্ঠীভুক্ত করার জন্য একটি সহ-উদ্ধৃতি বিশ্লেষণ পরিচালনা করেছি।
- অবশেষে, আমরা সহযোগিতা নেটওয়ার্ক চিত্রিত করার জন্য দেশ, প্রতিষ্ঠান এবং জার্নালগুলির মধ্যে সংযোগ এবং সংযোগগুলি বিশ্লেষণ করেছি।
উপযুক্ত অনুসন্ধান পদ সনাক্তকরণ
আমরা ডেটা একত্রিত করার জন্য নিম্নলিখিত অনুসন্ধান স্ট্রিংগুলি প্রয়োগ করেছি: (ড্রোন* বা "মানবহীন আকাশযান" বা uav* বা "মানবহীন বিমান ব্যবস্থা"বা uas বা "দূরবর্তীভাবে চালিত বিমান”) এবং (কৃষি বা কৃষি বা কৃষি বা কৃষক) 2021 সালের সেপ্টেম্বরে অনুসন্ধানটি পরিচালিত হয়েছিল৷ ড্রোনগুলির বেশ কয়েকটি উপাধি রয়েছে, যার মধ্যে রয়েছে UAV, UAS এবং দূরবর্তীভাবে চালিত বিমান (Sah et al., 2021)৷ আবদুল্লাহি এট আল-এর অধ্যয়নের ভিত্তিতে কৃষি সম্পর্কিত নির্দিষ্ট অনুসন্ধান শব্দগুলি চিহ্নিত করা হয়েছিল। (2021)। স্বচ্ছতা এবং স্বচ্ছতার জন্য, আমরা যে সঠিক প্রশ্নটি ব্যবহার করেছি তা পরিশিষ্ট 1-এ দেওয়া হয়েছে। ডেটা পরিষ্কার করার প্রক্রিয়া অনুসরণ করে, আমরা একটি পাঠ্য ফাইল তৈরি করেছি যা পরবর্তীতে BibExcel-এ লোড করা হয়েছিল, উদ্ধৃতি এবং সহ-উদ্ধৃতি বিশ্লেষণের জন্য একটি সাধারণ টুল। এই টুলটি অন্যান্য সফ্টওয়্যারের সাথে সহজ ইন্টারঅ্যাকশনও অফার করে এবং ডেটা হ্যান্ডলিং এবং বিশ্লেষণে একটি উল্লেখযোগ্য মাত্রার স্বাধীনতা প্রদান করে। ভিওএসভিউয়ার সংস্করণ 1.6.16 ফলাফলগুলি কল্পনা করতে এবং বাইবলিওমেট্রিক নেটওয়ার্কগুলি তৈরি করতে ব্যবহৃত হয়েছিল (Eck & Waltman, 2009)। ভিওএসভিউয়ার স্বজ্ঞাত ভিজ্যুয়ালাইজেশনের একটি পরিসর অফার করে, বিশেষ করে বাইবলিওমেট্রিক ম্যাপ বিশ্লেষণ করার জন্য (গেং এট আল।, 2020)। উপরন্তু, এটি সরল চাক্ষুষ ফলাফল প্রদানে সহায়তা করে যা ফলাফলগুলিকে আরও ভালভাবে বুঝতে সাহায্য করে (Abdullahi et al., 2021)। উপরে উল্লিখিত অনুসন্ধান স্ট্রিংগুলি প্রয়োগ করে, আমরা সমস্ত প্রাসঙ্গিক প্রকাশনা সংগ্রহ এবং সংরক্ষণ করেছি। প্রথম অনুসন্ধানের ফলাফলে মোট 5,085টি নথি পাওয়া গেছে। নির্বাচিত নমুনার গুণমান নিশ্চিত করার জন্য, গবেষণায় শুধুমাত্র সমকক্ষ-পর্যালোচিত জার্নাল নিবন্ধগুলি বিবেচনা করা হয়েছিল, যার ফলে বই, অধ্যায়, সম্মেলনের কার্যপ্রণালী এবং সম্পাদকীয় নোটের মতো অন্যান্য নথির প্রকারগুলিকে বাদ দেওয়া হয়েছিল৷ একটি স্ক্রীনিং প্রক্রিয়া চলাকালীন, অপ্রাসঙ্গিক (অর্থাৎ, এই কাজের সুযোগের বাইরে), অপ্রয়োজনীয় (অর্থাৎ, ডবল ইন্ডেক্সিং থেকে উদ্ভূত সদৃশ), এবং অ-ইংরেজি-ভাষী প্রকাশনাগুলি ফিল্টার করা হয়েছিল। এই প্রক্রিয়ার ফলে চূড়ান্ত বিশ্লেষণে 4,700টি নথি অন্তর্ভুক্ত করা হয়েছে।
অনুসন্ধান এবং আলোচনা
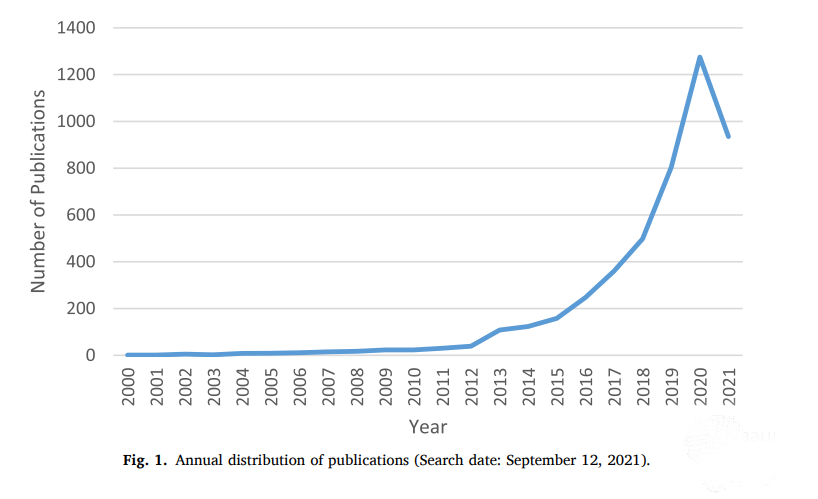
শুরু করার জন্য, আমরা কৃষি ড্রোনের বর্তমান সাহিত্যে প্রকাশনা আউটপুটের উন্নয়ন বিশ্লেষণ করেছি। পাণ্ডিত্যপূর্ণ গবেষণার সাময়িক বিতরণ চিত্র 1-এ দেখানো হয়েছে। আমরা 2011 সাল থেকে (30টি প্রকাশনা) প্রকাশনার দ্রুত বৃদ্ধি দেখতে পাচ্ছি; অতএব, আমরা বিশ্লেষণের সময়কে দুটি ভিন্ন পর্যায়ে বিভক্ত করার সিদ্ধান্ত নিয়েছি। আমরা 1990 এবং 2010 এর মধ্যবর্তী সময়টিকে বিল্ড আপ স্টেজ হিসাবে উল্লেখ করি, যেখানে বার্ষিক প্রায় সাতটি গবেষণাপত্র প্রকাশিত হয়েছিল। 2010-পরবর্তী সময়কালকে বৃদ্ধির পর্যায় বলা হয় কারণ এই সময়কালে কৃষিতে ড্রোন প্রয়োগের উপর গবেষণা একটি সূচকীয় বৃদ্ধির সাক্ষী হয়েছিল। 2010 সালের পরে, প্রকাশনার ক্রমবর্ধমান সংখ্যা গবেষকদের মধ্যে ক্রমবর্ধমান আগ্রহের বিষয়টি নিশ্চিত করে, যা এটিও প্রতিফলিত করে যে ড্রোনগুলি দূরবর্তী অনুধাবনে প্রয়োগ করা হয়েছে এবং নির্ভুল কৃষিতে ব্যবহার করা হয়েছে (ডেং এট আল।, 2018; মেস এবং স্টেপ, 2019; মেসিনা এবং মোডিকা, 2020 ) বিশেষ করে, প্রকাশনার সংখ্যা 108 সালে 2013 থেকে বেড়ে 498 সালে 2018-এ দাঁড়িয়েছে এবং 1,275-এ 2020-এ পৌঁছেছে। 935 সালের জানুয়ারি থেকে সেপ্টেম্বরের মাঝামাঝি সময়ে মোট 2021টি নিবন্ধ প্রকাশিত হয়েছিল। পরবর্তীকালে, আমরা আমাদের বৃদ্ধির পর্যায়ে আরও বেশি ফোকাস করতে বেছে নিয়েছি। যেহেতু এই সময়কালটি কৃষি ড্রোনগুলির সবচেয়ে সাম্প্রতিক এবং গুরুত্বপূর্ণ সূক্ষ্মতাগুলিকে প্রতিফলিত করে।
কীওয়ার্ড বিশ্লেষণ
একটি প্রকাশনার জন্য লেখকরা যে কীওয়ার্ডগুলি নির্বাচন করেন তার একটি গুরুত্বপূর্ণ প্রভাব রয়েছে কীভাবে কাগজটি উপস্থাপন করা হয় এবং কীভাবে এটি বৈজ্ঞানিক সম্প্রদায়ের মধ্যে যোগাযোগ করা হয়। তারা গবেষণার মূল বিষয়গুলি চিহ্নিত করে এবং এর বিকাশ বা ব্যর্থ হওয়ার সম্ভাবনা নির্ধারণ করে (Day & Gastel, 1998.; Kim et al., 2016; Uddin et al., 2015)। কীওয়ার্ড বিশ্লেষণ, বৃহত্তর গবেষণার প্রবণতা এবং দিকনির্দেশগুলি প্রকাশ করার একটি সরঞ্জাম, একটি ডোমেনে সমস্ত সম্পর্কিত প্রকাশনার কীওয়ার্ডগুলির সংকলনকে বোঝায় (দীক্ষিত এবং জাখর, 2021)। বর্তমান গবেষণায়, আমরা সর্বাধিক জনপ্রিয় বিষয়গুলি অন্বেষণ করতে সমষ্টিগত কীওয়ার্ডগুলিকে দুটি সেটে (অর্থাৎ, 2010 এবং 2011-2021 পর্যন্ত) ভাগ করেছি৷ এটি করার মাধ্যমে, আমরা উভয় সেটেই গুরুত্বপূর্ণ কীওয়ার্ডগুলি ট্রেস করতে পারি এবং নিশ্চিত করতে পারি যে আমরা সমস্ত প্রয়োজনীয় ডেটা ক্যাপচার করেছি৷ প্রতিটি সেটের জন্য, শীর্ষ দশটি কীওয়ার্ড সারণী 3-এ উপস্থাপিত হয়েছে। আমরা শব্দার্থগতভাবে অভিন্ন কীওয়ার্ড, যেমন "ড্রোন" এবং "ড্রোন" বা একইভাবে, "ইন্টারনেট অফ থিংস" এবং "আইওটি" একত্রিত করে অসঙ্গতি দূর করেছি।
সারণি 3 দেখায় যে "মানবহীন আকাশযান" উভয় সময়কালের "ড্রোন" এবং "মানবহীন এরিয়াল সিস্টেম" এর তুলনায় বেশি ব্যবহৃত শব্দ। এছাড়াও, "রিমোট সেন্সিং", "নির্ভুল কৃষি," এবং "কৃষি" উভয় সময়কালেই উচ্চ র্যাঙ্ক করা হয়েছে। প্রথম পিরিয়ডে, "নির্ভুল কৃষি" পঞ্চম স্থানে ছিল, এবং দ্বিতীয় মেয়াদে এটি দ্বিতীয় স্থানে রয়েছে, যা ব্যাখ্যা করে যে কীভাবে ড্রোনগুলি নিরীক্ষণ করতে পারে সেহেতু নির্ভুল কৃষি অর্জনে ক্রমবর্ধমান গুরুত্বপূর্ণ হয়ে উঠছে,
অন্যান্য রিমোট সেন্সিং এবং গ্রাউন্ড-ভিত্তিক সিস্টেমের তুলনায় সনাক্তকরণ, এবং অনুমানের অনুশীলনগুলি দ্রুত, সস্তা এবং সহজে সম্পাদন করা যায়। এছাড়াও, তারা প্রয়োজনে সঠিক পরিমাণ ইনপুট (যেমন, জল বা কীটনাশক) স্প্রে করতে পারে (গুও এট আল।, 2020; ইনোউ, 2020; পান্ডে, প্রতিহাস্ট, এট আল।, 2020)।
সর্বাধিক ব্যবহৃত কীওয়ার্ডের তালিকা।
মর্যাদাক্রম | 1990-2010 | এর সংখ্যা ঘটনা | 2011-2021 | এর সংখ্যা ঘটনা |
| 1 | মনুষ্যবিহীন বায়বীয় বাহন | 28 | জনহীন বিমান বাহন | 1628 |
| 2 | রিমোট সেন্সিং | 7 | স্পষ্টতা কৃষি | 489 |
| 3 | কৃষি | 4 | রিমোট সেন্সিং | 399 |
| 4 | বায়ুবাহিত | 4 | গুঁজনধ্বনি | 374 |
| 5 | স্পষ্টতা কৃষি | 4 | জনহীন বায়বীয় সিস্টেম | 271 |
| 6 | মনুষ্যবিহীন বায়বীয় | 4 | কৃষি | 177 |
| 7 | হাইপারস্পেকট্রাল সেন্সর | 3 | গভীর জ্ঞানার্জন | 151 |
| 8 | কৃত্রিম নিউরাল নেটওয়ার্ক | 2 | মেশিন শিক্ষা | 149 |
| 9 | স্বায়ত্তশাসিত ফ্লাইট | 2 | গাছপালা সূচক | 142 |
| 10 | কফি | 2 | এর ইন্টারনেট থিংস | 124 |
আরেকটি আকর্ষণীয় বৈশিষ্ট্য হল পরিপূরক প্রযুক্তির উপস্থিতি। প্রথম পর্যায়ে, "হাইপারস্পেকট্রাল সেন্সর" এবং "কৃত্রিম নিউরাল নেটওয়ার্ক" (ANN) শীর্ষ দশটি কীওয়ার্ডের মধ্যে রয়েছে। হাইপারস্পেকট্রাল ইমেজিং বিভিন্ন তরঙ্গদৈর্ঘ্যে বিপুল সংখ্যক চিত্র সংগ্রহ করে ঐতিহ্যগত ইমেজিংকে বিপ্লব করেছে। এটি করার মাধ্যমে, মাল্টিস্পেকট্রাল ইমেজিং, স্পেকট্রোস্কোপি এবং আরজিবি চিত্রের তুলনায় সেন্সরগুলি একই সাথে আরও ভাল স্থানিক এবং বর্ণালী তথ্য সংগ্রহ করতে পারে (Adao ˜ et al.,
2017)। প্রথম পর্যায়ে "ANN" এবং দ্বিতীয় পর্যায়ে "ডিপ লার্নিং" (DL) এবং "মেশিন লার্নিং" (ML) এর উপস্থিতি বোঝায় যে প্রকাশিত বেশিরভাগ কাজ ড্রোনের জন্য AI কৌশলগুলির সম্ভাব্যতার পরীক্ষাকে কেন্দ্র করে- ভিত্তিক কৃষি। যদিও ড্রোনগুলি স্বায়ত্তশাসিতভাবে উড়তে সক্ষম, তবুও তাদের একটি পাইলটের জড়িত থাকার প্রয়োজন, যা ডিভাইসের বুদ্ধিমত্তার নিম্ন স্তরকে বোঝায়। যাইহোক, এআই কৌশলগুলির অগ্রগতির কারণে এই সমস্যাটি সমাধান করা যেতে পারে, যা পরিস্থিতিগত সচেতনতা এবং স্বায়ত্তশাসিত সিদ্ধান্ত সমর্থন প্রদান করতে পারে। AI দিয়ে সজ্জিত, ড্রোন নেভিগেশনের সময় সংঘর্ষ এড়াতে পারে, মাটি ও শস্য ব্যবস্থাপনার উন্নতি করতে পারে (Inoue, 2020), এবং মানুষের জন্য শ্রম ও চাপ কমাতে পারে (BK Sharma et al., 2019)।
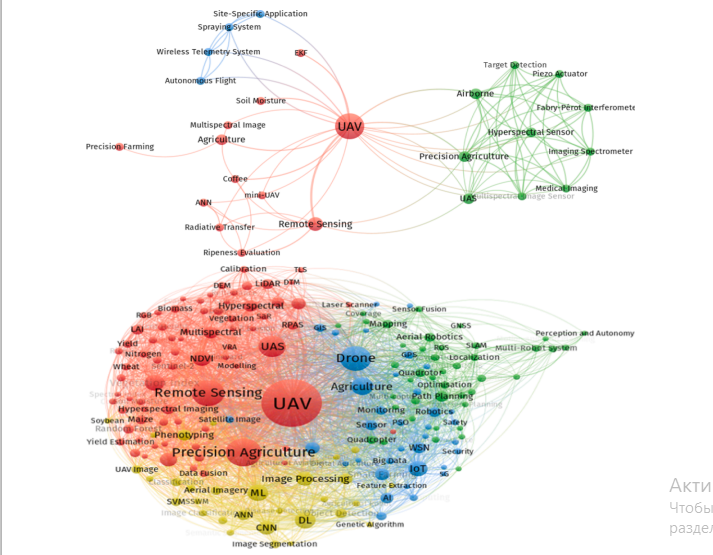
তাদের নমনীয়তা এবং বিপুল পরিমাণ ননলাইনার ডেটা পরিচালনা করার ক্ষমতার কারণে, এআই কৌশলগুলি ভবিষ্যদ্বাণী এবং সিদ্ধান্ত নেওয়ার জন্য ড্রোন এবং অন্যান্য রিমোট-সেন্সিং এবং গ্রাউন্ড-ভিত্তিক সিস্টেম দ্বারা প্রেরিত ডেটা বিশ্লেষণ করার উপযুক্ত পদ্ধতি (আলি এট আল।, 2015; Inoue, 2020)। অধিকন্তু, দ্বিতীয় মেয়াদে "IoT" এর উপস্থিতি কৃষিতে এর উদীয়মান ভূমিকা নির্দেশ করে। আইওটি ড্রোন, এমএল, ডিএল, ডাব্লুএসএন এবং বিগ ডেটা সহ অন্যান্য প্রযুক্তিকে আন্তঃসংযোগ করে কৃষিতে বিপ্লব ঘটাচ্ছে। আইওটি বাস্তবায়নের মূল সুবিধাগুলির মধ্যে একটি হ'ল কাছাকাছি বাস্তব সময়ে বিভিন্ন কাজ (ডেটা অর্জন, ডেটা বিশ্লেষণ এবং প্রক্রিয়াকরণ, সিদ্ধান্ত গ্রহণ এবং বাস্তবায়ন) দক্ষতার সাথে এবং কার্যকরভাবে একত্রিত করার ক্ষমতা (Elijah et al., 2018; Feng et al. , 2019; মুয়াংপ্রথুব এট আল।, 2019)। তদুপরি, ড্রোনগুলিকে উদ্ভিদের শক্তি এবং উদ্ভিদের বৈশিষ্ট্যগুলি গণনা করার জন্য প্রয়োজনীয় ডেটা ক্যাপচার করার জন্য দক্ষ সরঞ্জাম হিসাবে বিবেচনা করা হয় (ক্যানডিয়াগো এট আল।, 2015)। চিত্র 2a এবং 2b উভয় সময়ের জন্য কীওয়ার্ড সহ-ঘটনা নেটওয়ার্কগুলিকে চিত্রিত করে।
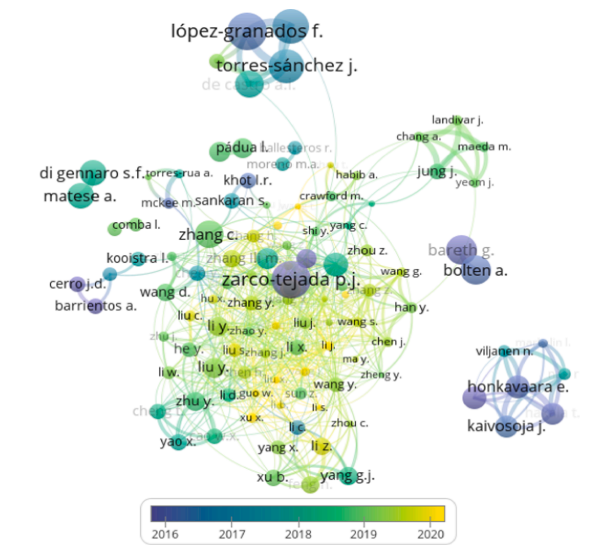
প্রভাবশালী লেখক
এই বিভাগে, আমরা প্রভাবশালী লেখক নির্ধারণ করি এবং পরীক্ষা করি কিভাবে লেখক উদ্ধৃতি নেটওয়ার্ক বর্তমান সাহিত্যকে কল্পনা ও সংগঠিত করতে পারে। চিত্র 3 সর্বাধিক সংখ্যক উদ্ধৃতি সহ সমস্ত গবেষকদের কালানুক্রমিক ওভারলে দেখায়৷ রঙের স্কেল লেখকদের উদ্ধৃতিগুলির বছরভিত্তিক বৈচিত্র প্রতিফলিত করে। আমরা ন্যূনতম 50টি উদ্ধৃতি এবং দশটি প্রকাশনার থ্রেশহোল্ড ব্যবহার করে কৃষি ড্রোনের উপর গবেষণা প্রকাশকারী গবেষকদের উদ্ধৃতি কাঠামো পরীক্ষা করি। এর বাইরে
12,891 লেখক, মাত্র 115 জন এই শর্ত পূরণ করেছেন। সারণি 4 শীর্ষ দশটি প্রভাবশালী লেখকের তালিকা করে, সর্বোচ্চ সংখ্যক উদ্ধৃতি অনুসারে সাজানো। লোপেজ- গ্রানাডোস এফ. 1,963টি উদ্ধৃতি নিয়ে তালিকার শীর্ষে, জারকো-তেজাদা পিজে 1,909টি উদ্ধৃতি নিয়ে অনুসরণ করেছেন৷
সর্বাধিক উদ্ধৃত লেখকদের তালিকা.
| রাঙ্কিং | লেখক | উদ্ধৃতিসমূহ |
| 1 | লোপেজ-গ্রানাডোস এফ। | 1,963 |
| 2 | জারকো-তেজাদা পিজে | 1,909 |
| 3 | পেনা ˜ জেএম | 1,644 |
| 4 | টরেস-এস' আনচেজ জে। | 1,576 |
| 5 | ফেরেস ই | 1,339 |
| 6 | রেমন্ডিনো এফ | 1,235 |
| 7 | বোল্টেন এ | 1,160 |
| 8 | বারেথ জি | 1,155 |
| 9 | বার্নি জেএ | 1,132 |
| 10 | ডি কাস্ত্রো এআই | 1,036 |
যখন এটি পৃথক প্রকাশনার ক্ষেত্রে আসে, Zhang and Kovacs এর (2012) নিবন্ধটি যথার্থ কৃষিতে প্রকাশিত সর্বাধিক উদ্ধৃত গবেষণা হয়েছে। এখানে, লেখকরা নির্ভুল কৃষিতে UAS এর প্রয়োগ পর্যালোচনা করেছেন। তাদের গবেষণার ফলাফলগুলি পরামর্শ দেয় যে কৃষকদের নির্ভরযোগ্য শেষ পণ্য সরবরাহ করার জন্য প্ল্যাটফর্মের নকশা, উত্পাদন, চিত্র জিওরেফারেন্সিংয়ের মানককরণ এবং তথ্য পুনরুদ্ধারের কার্যপ্রবাহের অগ্রগতি প্রয়োজন। উপরন্তু, তারা কৃষককে আরও জোরালোভাবে জড়িত করার সুপারিশ করে, বিশেষ করে ক্ষেত্র পরিকল্পনা, চিত্র ক্যাপচার, সেইসাথে ডেটা ব্যাখ্যা এবং বিশ্লেষণে। গুরুত্বপূর্ণভাবে, এই অধ্যয়নটি ফিল্ড ম্যাপিং, জোরালো ম্যাপিং, রাসায়নিক সামগ্রী পরিমাপ, গাছপালা স্ট্রেস পর্যবেক্ষণ এবং উদ্ভিদের বৃদ্ধিতে সারের প্রভাবের মূল্যায়নে UAV-এর গুরুত্ব দেখানোর মধ্যে প্রথম ছিল। প্রযুক্তির সাথে সম্পর্কিত চ্যালেঞ্জগুলির মধ্যে রয়েছে নিষিদ্ধ খরচ, সেন্সর ক্ষমতা, প্ল্যাটফর্মের স্থায়িত্ব এবং নির্ভরযোগ্যতা, প্রমিতকরণের অভাব এবং বিপুল পরিমাণ ডেটা বিশ্লেষণ করার জন্য ধারাবাহিক পদ্ধতি।
উদ্ধৃতি বিশ্লেষণ
উদ্ধৃতি বিশ্লেষণ নিবন্ধের প্রভাবের অধ্যয়নকে প্রতিনিধিত্ব করে, যদিও প্রবাহের প্রবণতা (যেমন, উদ্ধৃতি পক্ষপাতিত্ব, স্ব-উদ্ধৃতি) প্রভাব মূল্যায়নের জন্য একটি আদর্শ উপকরণ হিসাবে বিবেচিত হয় (ওসারেহ, 1996; এ. রেজেব এট আল।, 2022; সারলি এট আল।, 2010)। উদ্ধৃতিগুলি একটি নির্দিষ্ট বিষয়ে সাহিত্যে গবেষণাপত্রের অবদানের গুরুত্ব এবং প্রাণবন্ততাও প্রতিফলিত করে (আর. শর্মা এট আল।, 2022)। আমরা কৃষি ড্রোনের উপর সবচেয়ে প্রভাবশালী গবেষণা নির্ধারণ করতে একটি উদ্ধৃতি বিশ্লেষণ পরিচালনা করেছি এবং বিষয়বস্তুগুলির সংক্ষিপ্তসার করেছি। সারণি 5 1990-2010 এবং 2011-2021 সময়ের জন্য পনেরটি সবচেয়ে প্রভাবশালী কাগজের তালিকা উপস্থাপন করে। বার্নি এট আল দ্বারা নিবন্ধ. (2009)বি এবং অস্টিন (2010) 1990 এবং 2010 সালে যথাক্রমে 831 এবং 498টি উদ্ধৃতি সহ সর্বাধিক উদ্ধৃত হয়েছে। বার্নি এট আল। (2009)b সাশ্রয়ী মূল্যের তাপীয় এবং ন্যারোব্যান্ড মাল্টিস্পেকট্রাল ইমেজিং সেন্সর সহ একটি হেলিকপ্টার-ভিত্তিক UAV-এর মাধ্যমে পরিমাণগত রিমোটসেন্সিং পণ্য বিকাশের সম্ভাবনাকে চিত্রিত করেছে। ঐতিহ্যবাহী মনুষ্যবাহী বায়ুবাহিত সেন্সরগুলির তুলনায়, কৃষির জন্য একটি কম খরচের ইউএভি সিস্টেম ফসলের বায়োফিজিক্যাল পরামিতিগুলির তুলনামূলক অনুমান অর্জন করতে সক্ষম, যদি ভাল না হয়। দ্রুত পরিবর্তনের সময়ে উপলব্ধ উচ্চ বর্ণালী, স্থানিক এবং অস্থায়ী রেজোলিউশনের পাশাপাশি সাশ্রয়ী মূল্যের খরচ এবং কর্মক্ষম নমনীয়তা, সেচের সময়সূচী এবং নির্ভুল চাষ সহ সময়-সমালোচনামূলক ব্যবস্থাপনার প্রয়োজন হয় এমন বিভিন্ন অ্যাপ্লিকেশনের জন্য উপযুক্ত UAV রেন্ডার করে। Berni এট আল থেকে কাগজ. (2009)b উচ্চভাবে উদ্ধৃত করা হয়েছে কারণ এটি কার্যকরভাবে একটি মনুষ্যবিহীন রোটারি-উইং প্ল্যাটফর্ম এবং ডিজিটাল ও থার্মাল সেন্সরকে কৃষি অ্যাপ্লিকেশনের জন্য প্রয়োজনীয় ক্রমাঙ্কন প্রক্রিয়ার সাথে একত্রিত করেছে। দ্বিতীয় সর্বাধিক উদ্ধৃত প্রকাশনা হল অস্টিন (2010) দ্বারা রচিত একটি বই, যিনি নকশা, উন্নয়ন এবং স্থাপনার দৃষ্টিকোণ থেকে UAV নিয়ে আলোচনা করেছেন। কৃষিতে, ইউএভিগুলি শস্যের রঙ পরিবর্তনের মাধ্যমে রোগ শনাক্ত করে, শস্য বপন এবং স্প্রে করার সুবিধা প্রদান করে এবং পশুপালকে পর্যবেক্ষণ ও চালনা করে শস্য পর্যবেক্ষণকে সহায়তা করে।
সুলিভান এট আল-এর গবেষণা। (2007), Lumme et al. (2008), এবং Gokto ¨ ǧan et al. (2010) শীর্ষ পনেরটি সর্বাধিক উদ্ধৃত নিবন্ধের তালিকা শেষ করুন। এই নিবন্ধগুলি কৃষিকে সমর্থন করার জন্য UAV-ভিত্তিক সিস্টেমের বিকাশকে চিত্রিত করে। তারা বিভিন্ন সমস্যার সমাধান দেয়, যেমন শস্য পর্যবেক্ষণ এবং স্ক্যানিং, আগাছা নজরদারি এবং ব্যবস্থাপনা এবং সিদ্ধান্ত সমর্থন। তারা স্যাম্পলিং দক্ষতা বাড়াতে UAV এর ক্ষমতার পরামর্শ ও আলোচনা করে এবং সঠিক ও কার্যকরী পরিকল্পনা করতে কৃষকদের সাহায্য করে
রোপণ কৌশল। দুটি গবেষণাপত্র বার্নি (Berni et al., 2009b; Berni et al., 2009a), কৃষি ড্রোন-সম্পর্কিত গবেষণার উপর তার উল্লেখযোগ্য প্রভাবের উপর জোর দিয়ে লিখেছেন। Zarco-Tejada এট আল থেকে কাগজ. (2014) গাছের উচ্চতা পরিমাপের ক্ষেত্রে কম খরচে ইউএভি চিত্র ব্যবহার করার প্রয়োজনীয়তা চিত্রিত করার জন্য অগ্রণী গবেষণার মধ্যে রয়েছে।
সর্বাধিক উদ্ধৃত প্রকাশনার তালিকা.
| মর্যাদাক্রম | 1990 থেকে 2010 পর্যন্ত | 2011 থেকে 2021 পর্যন্ত | ||
| দলিল | তলব | দলিল | তলব | |
| 1 | (বার্নি এট আল।, 2009বি) | 831 | (সি. ঝাং এবং কোভাকস, 2012) | 967 |
| 2 | (অস্টিন, 2010) | 498 | (নেক্স এবং রেমন্ডিনো, 2014) | 893 |
| 3 | (হান্ট এট আল।, 2010) | 331 | (ফ্লোরানো এবং উড, 2015) | 552 |
| 4 | (এসআর হারউইটজ এট আল।, 2004) | 285 | (হোসেন মতলঘ ও অন্যান্য, 2016) | 391 |
| 5 | (CCD Lelong et al., 2008) | 272 | (শাখাত্রেহ এট আল।, 2019) | 383 |
| 6 | (বার্নি এট আল।, 2009বি) | 250 | (মা এট আল।, 2017) | 373 |
| 7 | (Grenzdorffer ¨ et al., 2008) | 198 | (Bendig et al., 2014) | 360 |
| 8 | (হরাবার এট আল।, 2005) | 175 | (জারকো-তেজাদা এট আল।, 2014) | 347 |
| 9 | (Y. Huang et al., 2009) | 129 | (বিজ্ঞাপন ao et al., 2017) | 335 |
| 10 | (Schmale III et al., 2008) | 119 | (হনকাভারা এট আল।, 2013) | 331 |
| 11 | (আব্দ-এলরহমান ও অন্যান্য।, 2005) | 79 | (Candiago et al., 2015) | 327 |
| 12 | (টেকি এট আল।, 2010) | 69 | (জিয়াং এবং তিয়ান, 2011) | 307 |
| 13 | (সুলিভান এট আল।, 2007) | 51 | (Matese et al., 2015) | 303 |
| 14 | (লুমে এট আল।, 2008) | 42 | (Gago et al., 2015) | 275 |
| 15 | (Gokto ¨ ǧan et al., 2010) | 40 | (Aasen et al., 2015a) | 269 |
দ্বিতীয় মেয়াদে (2011-2021), Zhang and Kovacs (2012) এবং Nex and Remondino (2014) এর গবেষণার ফলে সর্বাধিক ঘন ঘন উদ্ধৃত প্রকাশনা পাওয়া গেছে। Zhang এবং Kovacs (2012) যুক্তি দেন যে সঠিক কৃষি ভূ-স্থানিক কৌশল এবং সেন্সর, যেমন ভৌগোলিক তথ্য সিস্টেম, GPS এবং দূরবর্তী অনুধাবন, ক্ষেত্রের বৈচিত্রগুলি ক্যাপচার করতে এবং বিকল্প কৌশল প্রয়োগ করে তাদের পরিচালনা করার মাধ্যমে উপকৃত হতে পারে। নির্ভুল কৃষিতে একটি গেম-চেঞ্জার হিসাবে, ড্রোন গ্রহণ রিমোট সেন্সিং, বায়বীয় পর্যবেক্ষণকে সরলীকরণ, ফসলের বৃদ্ধির ডেটা ক্যাপচার, মাটির অবস্থা এবং স্প্রে করার ক্ষেত্রে একটি নতুন যুগের সূচনা করেছে। Zhang and Kovacs (2012) এর পর্যালোচনাটি গুরুত্বপূর্ণ কারণ এটি পরিবেশগত পর্যবেক্ষণ এবং নির্ভুল কৃষিতে এই ডিভাইসগুলির বিদ্যমান ব্যবহার এবং চ্যালেঞ্জগুলি যেমন প্ল্যাটফর্ম এবং ক্যামেরার সীমাবদ্ধতা, ডেটা প্রক্রিয়াকরণের চ্যালেঞ্জ, কৃষকের ব্যস্ততা এবং বিমান চলাচলের নিয়মাবলী প্রকাশ করে UAV-এর অন্তর্দৃষ্টি প্রদান করে। . দ্বিতীয়
নেক্স এবং রেমন্ডিনো (2014) থেকে সর্বাধিক উদ্ধৃত গবেষণায় পৃথিবীর চিত্রগুলি ক্যাপচার, প্রক্রিয়াকরণ এবং বিশ্লেষণের জন্য ইউএভিগুলির শিল্পের অবস্থা পর্যালোচনা করা হয়েছে।
তাদের কাজটি UAV ইমেজ প্রসেসিং-এ নতুন অগ্রগতি প্রদর্শন করে বেশ কয়েকটি UAV প্ল্যাটফর্ম, অ্যাপ্লিকেশন এবং ব্যবহারের ক্ষেত্রে একটি ওভারভিউও উপস্থাপন করেছে। কৃষিতে, কৃষকরা খরচ এবং সময় সাশ্রয়ের জন্য কার্যকর সিদ্ধান্ত নিতে, ক্ষতির দ্রুত এবং সুনির্দিষ্ট রেকর্ড পেতে এবং সম্ভাব্য সমস্যাগুলির পূর্বাভাস পেতে UAV ব্যবহার করতে পারে। প্রচলিত বায়বীয় প্ল্যাটফর্মের বিপরীতে, UAVs অপারেশনাল খরচ কমাতে পারে এবং এখনও উচ্চ নির্ভুল সম্ভাবনা সংরক্ষণ করে কঠোর অবস্থানে অ্যাক্সেসের বিপদ কমাতে পারে। তাদের কাগজ UAV-এর বিভিন্ন সুবিধার সংক্ষিপ্ত বিবরণ দেয়, বিশেষ করে নির্ভুলতা এবং রেজোলিউশনের ক্ষেত্রে।
2011 এবং 2021 সালের মধ্যে অবশিষ্ট তেরোটি সর্বাধিক উদ্ধৃত প্রকাশনার মধ্যে, আমরা ইমেজিং মিশনে ড্রোন অ্যাপ্লিকেশনগুলির সাথে যুক্ত গবেষণার উপর একটি বৃহত্তর ঘনত্ব লক্ষ্য করেছি (বেন্ডিগ এট আল।, 2014; মা এট আল।, 2017; জারকো-তেজাদা এট আল।, 2014) , নির্ভুল কৃষি (Candiago et al., 2015; Honkavaara et al., 2013a), precision viticulture (Matese et al., 2015), জলের চাপের মূল্যায়ন (Gago et al., 2015), এবং গাছপালা পর্যবেক্ষণ (Asen) , 2015a)। প্রাথমিক বছরগুলিতে, গবেষকরা মনোনিবেশ করেছিলেন
কৃষির জন্য কম খরচে, লাইটওয়েট, এবং সুনির্দিষ্ট UAV-ভিত্তিক সিস্টেমের উন্নয়নের উপর আরো; আরো সাম্প্রতিক গবেষণা কৃষি এবং ক্ষেত্রের জরিপ জন্য UAV অ্যাপ্লিকেশনের পর্যালোচনার উপর আরো ফোকাস করেছে. সংক্ষেপে, এই বিশ্লেষণটি প্রকাশ করে যে প্রভাবশালী প্রকাশনাগুলি বেশিরভাগই UAV-এর বর্তমান বৈজ্ঞানিক ও প্রযুক্তিগত অবস্থার মূল্যায়ন করার জন্য পূর্ববর্তী গবেষণার পর্যালোচনা প্রদান করেছে এবং নির্ভুল কৃষিকে সমর্থন করার জন্য UAV সিস্টেম উন্নত করেছে। মজার বিষয় হল, আমরা এমন অধ্যয়ন খুঁজে পাইনি যা পরীক্ষামূলক নিযুক্ত করে
পদ্ধতি বা বর্ণনামূলক কেস স্টাডি, যা একটি গুরুত্বপূর্ণ জ্ঞানের ব্যবধান গঠন করে এবং এই বিষয়ে আরও গবেষণার আহ্বান জানায়।
সহ-উদ্ধৃতি বিশ্লেষণ
Gmür (2006) অনুসারে, সহ-উদ্ধৃতি বিশ্লেষণ অনুরূপ প্রকাশনাকে চিহ্নিত করে এবং সেগুলিকে ক্লাস্টার করে। একটি ক্লাস্টারের যত্ন সহকারে পরীক্ষা প্রকাশনাগুলির মধ্যে গবেষণার একটি সাধারণ ক্ষেত্র প্রকাশ করতে পারে। আমরা সংশ্লিষ্ট বিষয়ের ক্ষেত্রগুলিকে চিত্রিত করতে এবং প্রকাশনার বুদ্ধিবৃত্তিক নিদর্শনগুলি সনাক্ত করতে কৃষি ড্রোন সম্পর্কিত সাহিত্যের সহ-উদ্ধৃতি তদন্ত করি। এই বিষয়ে, Small (1973) সবচেয়ে প্রভাবশালী এবং মৌলিক গবেষণা অধ্যয়ন করতে cocitation বিশ্লেষণ ব্যবহারের সুপারিশ করেছে
একটি শৃঙ্খলার মধ্যে। সেটটিকে সবচেয়ে গুরুত্বপূর্ণ নিবন্ধগুলিতে সীমাবদ্ধ করতে (গয়াল ও কুমার, 2021), আমরা 25-এর একটি সহ-উদ্ধৃতি থ্রেশহোল্ড সেট করেছি, যার অর্থ হল দুটি নিবন্ধ অবশ্যই 25 বা তার বেশি ভিন্ন প্রকাশনার রেফারেন্স তালিকায় একসাথে উদ্ধৃত করা উচিত। ক্লাস্টারিংটি ন্যূনতম ক্লাস্টার আকার 1 সহ এবং বড়গুলির সাথে ছোট ক্লাস্টারগুলিকে একত্রিত করার জন্য কোনও পদ্ধতি ছাড়াই পরিচালিত হয়েছিল। ফলস্বরূপ, অধ্যয়নের মিল এবং তাদের বুদ্ধিবৃত্তিক কাঠামোর উপর ভিত্তি করে ছয়টি ক্লাস্টার তৈরি করা হয়েছিল। সারণি 6 প্রতিটি ক্লাস্টারে প্রকাশনা বিতরণ দেখায়।
ক্লাস্টার 1: এই ক্লাস্টারে আঠারটি নথি রয়েছে যা প্রকাশিত হওয়ার পরে এই ক্লাস্টারের প্রকাশনাগুলি পরিবেশগত পর্যবেক্ষণ, ফসল ব্যবস্থাপনা এবং আগাছা ব্যবস্থাপনার সমর্থনে ড্রোনের ভূমিকা নিয়ে আলোচনা করে। উদাহরণস্বরূপ, Manfreda et al. (2018) প্রাকৃতিক কৃষি ইকোসিস্টেম পর্যবেক্ষণে UAV-এর বর্তমান গবেষণা এবং বাস্তবায়নের একটি ওভারভিউ প্রদান করে এবং যুক্তি দেয় যে প্রযুক্তিটি পরিবেশগত পর্যবেক্ষণকে ব্যাপকভাবে বৃদ্ধি এবং হ্রাস করার জন্য অসাধারণ সম্ভাবনা প্রদান করে।
ক্ষেত্র পর্যবেক্ষণ এবং প্রচলিত বায়ু এবং মহাকাশবাহিত রিমোট সেন্সিংয়ের মধ্যে বিদ্যমান ব্যবধান। এটি একটি সাশ্রয়ী মূল্যের উপায়ে বড় এলাকায় উন্নত অস্থায়ী পুনরুদ্ধার এবং স্থানিক অন্তর্দৃষ্টির জন্য নতুন ক্ষমতা প্রদানের মাধ্যমে করা যেতে পারে। UAVs ক্রমাগত পরিবেশকে অনুধাবন করতে পারে এবং ফলস্বরূপ ডেটা বুদ্ধিমান, কেন্দ্রীভূত/বিকেন্দ্রীভূত সত্ত্বার কাছে পাঠাতে পারে যা রোগ বা জল সনাক্তকরণের অভাবের মতো সমস্যাগুলি সনাক্ত করতে সেন্সরগুলিকে নিয়ন্ত্রণ করে (পডুয়া ´ এট আল।, 2017)। আদাও ˜ ইত্যাদি (2017) পোজিট যে UAVs জলের অবস্থা, জৈববস্তু অনুমান, এবং জোরালো মূল্যায়ন সম্পর্কিত কাঁচা তথ্যের একটি বিশাল পরিমাণ ক্যাপচার করে উদ্ভিদের অবস্থা মূল্যায়নের জন্য আদর্শ। UAV-মাউন্ট করা সেন্সরগুলিকে যথাযথ পরিবেশগত পরিস্থিতিতে অবিলম্বে স্থাপন করা যেতে পারে যাতে রিমোট সেন্সিং ডেটা সময়মত ক্যাপচার করা যায় (Von Bueren et al., 2015)। UAV-এর মাধ্যমে, কৃষকরা অভ্যন্তরীণ কৃষি পরিবেশের ত্রিমাত্রিক স্থানের (যেমন, গ্রিনহাউস) কার্যত যেকোনো স্থান থেকে পরিমাপ অর্জন করে অভ্যন্তরীণ কৃষিকাজ কার্যক্রম পরিচালনা করতে সক্ষম হয়, যার ফলে স্থানীয় জলবায়ু নিয়ন্ত্রণ এবং উদ্ভিদ পর্যবেক্ষণ নিশ্চিত করা যায় (Roldan ´ et al ., 2015)। যথার্থতার প্রসঙ্গে
কৃষি, শস্য ব্যবস্থাপনার সিদ্ধান্তের জন্য উপযুক্ত সাময়িক এবং স্থানিক রেজোলিউশনের সাথে সঠিক, নির্ভরযোগ্য ফসলের ডেটা প্রয়োজন (Gebbers & Adamchuk, 2010; Gevaert et al., 2015; Maes & Steppe, 2019)। এই কারণে, Agüera Vega et al. (2015) ক্রমবর্ধমান মরসুমে একটি সূর্যমুখী ফসলের ছবিগুলি অর্জন করতে একটি UAV-মাউন্ট করা মাল্টিস্পেকট্রাল সেন্সর সিস্টেম ব্যবহার করেছে৷ একইভাবে, হুয়াং এট আল। (2009) নোট করুন যে UAV-এর উপর ভিত্তি করে রিমোট সেন্সিং সংগৃহীত বর্ণালী ডেটা থেকে ফসল এবং মাটির পরিমাপকে সহজতর করতে পারে। ভার্জার এট আল। (2014) গম এবং রেপসিড শস্যের উপর দৃষ্টি নিবদ্ধ করে নির্ভুল কৃষি অ্যাপ্লিকেশনগুলিতে UAV প্রতিফলন পরিমাপ থেকে একটি সবুজ এলাকা সূচক (GAI) অনুমান করার জন্য একটি কৌশল তৈরি এবং পরীক্ষা করেছে। অতএব, ড্রোনগুলি ঘন ঘন পুনঃদর্শন এবং উচ্চ স্থানিক রেজোলিউশনের সাথে ফসলের অবস্থার তথ্য পুনরুদ্ধারের জন্য নতুন সম্ভাবনা প্রদান করে (ডং এট আল।, 2019; গারজোনিও এট আল।, 2017; এইচ. ঝেং এট আল।, 2016)।
কৃষি ড্রোনের উপর প্রভাবশালী প্রকাশনার ক্লাস্টারিং।
| গুচ্ছ | বিস্তৃত থিম | তথ্যসূত্র |
| 1 | পরিবেশ পর্যবেক্ষণ, ফসল ব্যবস্থাপনা, আগাছা ব্যবস্থাপনা | (বিজ্ঞাপন ao et al., 2017; আগুয়েরা ভেগা এট আল।, 2015; ডি কাস্ত্রো এট আল।, 2018; গোমেজ-ক্যান্ড ´ এট আল।, 2014; YB হুয়াং এট আল।, 2013; খানাল এট আল।, 2017; লোপেজ-গ্রানাডোস, ´ 2011; Manfreda et al., 2018; পি' আদুয়া এট আল।, 2017; পেনা ˜ এট আল।, 2013; পেরেজ-অরটিজ এট আল।, 2015; রাসমুসেন এট আল।, 2013, 2016; টরেস-এস' anchez et al., 2014; টরেস-সানচেজ, 'লোপেজ-গ্রানাডোস,' এবং পেনা, ˜ 2015; ভার্জার এট আল।, 2014; ভন বুয়েরেন এট আল।, 2015; সি. ঝাং এবং কোভাকস, 2012) |
| 2 | দূরবর্তী ফেনোটাইপিং, ফলন অনুমান, ফসলের পৃষ্ঠের মডেল, গাছপালা গণনা | (Bendig et al., 2013, 2014; Geipel এট আল।, 2014; Gnadinger ¨ & Schmidhalter, 2017; হাৰিঘাটালব এট আল।, 2016; Holman et al., 2016; জিন এট আল।, 2017; W. Li et al., 2016; মাইমাইটিজিয়াং এট আল।, 2017; শঙ্করন এট আল।, 2015; Schirrmann et al., 2016; শি এট আল।, 2016; Yue et al., 2017; এক্স. Zhou et al., 2017) |
| 3 | জলের জন্য তাপীয় চিত্র, মাল্টিস্পেকট্রাল ইমেজিং | (বালুজা এট আল।, 2012; বার্নি এট আল।, 2009b; বার্নি এট আল।, 2009a ; ক্যানডিয়াগো এট আল।, 2015; গাগো এট আল।, 2015; Gonzalez-Dugo et al., 2013, 2014; Grenzdorffer ¨ et al., 2008; খালিক et al., 2019; Matese এট আল।, 2015; Ribeiro-Gomes et al., 2017; Santesteban et al., 2017; Uto et al., 2013) |
| 4 | হাইপারসেক্ট্রাল ইমেজিং, বর্ণালী ইমেজিং | (Aasen et al., 2015a; Bareth et al., 2015; হাকালা এট আল।, 2013; Honkavaara et al., 2013a; লুসিয়ার এট আল।, 2014; Saari et al., 2011; সুওমালাইনেন এট আল।, 2014) |
| 5 | 3D-ম্যাপিং অ্যাপ্লিকেশন | (জিমেনেজ-ব্রেনেস এট আল।, 2017; নেক্স এবং Remondino, 2014; সালামি এট আল।, 2014; টরেস-এস' আনচেজ, লোপেজ- ´ Granados, Serrano, et al., 2015; জাহাউই এট আল।, 2015; জারকো-তেজাদা et al।, 2014) |
| 6 | কৃষি নজরদারি | (SR Herwitz et al., 2004; Hunt এট আল।, 2010; সিসিডি লেলং এট আল।, 2008; Primicerio et al., 2012; জিয়াং এবং তিয়ান, 2011) |
উপরন্তু, ড্রোন আগাছা ম্যাপিং সহ কৃষিতে চ্যালেঞ্জিং কাজের জন্য দরকারী। ডিভাইসগুলির দ্বারা ধারণ করা ছবিগুলি ক্ষেত্রগুলিতে প্রাথমিক আগাছা সনাক্তকরণের জন্য তাদের উপযোগিতা প্রমাণ করেছে (ডি কাস্ত্রো এট আল।, 2018; জিমেনেজ-ব্রেনেস এট আল।, 2017; ল্যাম এট আল।, 2021; লোপেজ-গ্রানাডোস ' এট আল।, 2016; রোজেনবার্গ এট আল।, 2021)। এই বিষয়ে, ডি কাস্ত্রো এট আল। (2018) মনে করেন যে UAV চিত্র এবং অবজেক্ট-ভিত্তিক চিত্র বিশ্লেষণ (OBIA) এর একত্রীকরণ অনুশীলনকারীদের প্রারম্ভিক মরসুমে তৃণভূমির ফসলে স্বয়ংক্রিয়ভাবে সনাক্তকরণের সমস্যাটি কাটিয়ে উঠতে সক্ষম করেছে, যা আগাছা গবেষণায় একটি বড় পদক্ষেপ। একইভাবে, Pena ˜ et al. (2013) উল্লেখ করেছে যে UAV থেকে অতি-উচ্চ স্থানিক রেজোলিউশন চিত্রগুলির ব্যবহার একটি OBIA পদ্ধতির সাথে একত্রিত করে প্রাথমিক ভুট্টা ফসলে আগাছার মানচিত্র তৈরি করা সম্ভব করে যা সিজনে আগাছা নিয়ন্ত্রণ ব্যবস্থা বাস্তবায়নের পরিকল্পনায় ব্যবহার করা যেতে পারে, স্যাটেলাইট এবং ঐতিহ্যগত বায়ুবাহিত চিত্রের ক্ষমতার বাইরে একটি কাজ। ইমেজ শ্রেণীবিভাগ বা অবজেক্ট ডিটেকশন অ্যালগরিদমের তুলনায়, শব্দার্থিক বিভাজন কৌশলগুলি আগাছা ম্যাপিং কাজগুলিতে আরও কার্যকর (J. Deng et al., 2020), এইভাবে কৃষকদের ক্ষেত্রের অবস্থা সনাক্ত করতে, ক্ষতি কমাতে এবং ক্রমবর্ধমান ঋতু জুড়ে ফলন উন্নত করতে সক্ষম করে (রমেশ) এট আল।, 2020)। ডিপ লার্নিং-ভিত্তিক শব্দার্থিক সেগমেন্টেশন উচ্চ-রেজোলিউশনের বায়বীয় চিত্রগুলি থেকে গাছপালা আবরণের একটি সঠিক পরিমাপও প্রদান করতে পারে (রমেশ এট আল।, 2020; এ. ঝেং এট আল।, 2022)। দূরবর্তী জন্য তাদের সম্ভাবনা সত্ত্বেও
সেন্সিং পিক্সেল শ্রেণীবিভাগ, শব্দার্থিক বিভাজন কৌশলগুলির জন্য উল্লেখযোগ্য গণনা এবং একটি নিষেধাজ্ঞামূলকভাবে উচ্চ GPU মেমরি প্রয়োজন (J. Deng et al., 2020)।
মেশিন লার্নিং এবং UAV-এর উপর ভিত্তি করে, P´erez-Ortiz et al. (2015) একটি আগাছা ম্যাপিং পদ্ধতির পরামর্শ দিয়েছে সাইট-নির্দিষ্ট আগাছা নিয়ন্ত্রণের কৌশল প্রদান করার জন্য যখন কৃষকরা প্রাথমিক-পরবর্তী আগাছা নিয়ন্ত্রণ গ্রহণ করে। অবশেষে, রাসমুসেন এট আল। (2013) হাইলাইট করেছে যে ড্রোনগুলি দুর্দান্ত স্থানিক রেজোলিউশন নমনীয়তার সাথে সস্তা সেন্সিং প্রদান করে। সামগ্রিকভাবে, এই ক্লাস্টারের প্রকাশনাগুলি রিমোট সেন্সিং, শস্য পর্যবেক্ষণ, এবং আগাছা ম্যাপিং সমর্থন করার জন্য UAV-এর সম্ভাব্যতা অন্বেষণের উপর ফোকাস করে। পরিবেশগত পর্যবেক্ষণ, শস্য ব্যবস্থাপনা, এবং আগাছা ম্যাপিং-এ ড্রোন অ্যাপ্লিকেশন কীভাবে আরও টেকসই কৃষি অর্জন করতে পারে তা আরও তদন্ত করার জন্য অতিরিক্ত গভীর গবেষণা প্রয়োজন (চামুয়া ও সিং, 2019; ইসলাম এট আল।, 2021; পোপেস্কু এট আল।, 2020; জে . Su, Liu, et al., 2018) এবং শস্য বীমা অ্যাপ্লিকেশনগুলিতে এই প্রযুক্তির প্রশাসনিক সমস্যাগুলির সমাধান করুন (বাসনেট এবং ব্যাং, 2018; চামুয়াহ এবং সিং, 2019, 2022; মেইনেন এবং রবিনসন, 2021)। প্রক্রিয়াকৃত ডেটার চূড়ান্ত গুণমান বাড়ানোর জন্য গবেষকদের দক্ষ প্রক্রিয়াকরণ কৌশল সহ UAV সংগৃহীত পরিমাপ যাচাই করার দিকে মনোনিবেশ করা উচিত (Manfreda et al., 2018)। তদ্ব্যতীত, ডিজিটাল চিত্রগুলিতে আগাছা প্রদর্শন করে এমন পিক্সেলগুলিকে চিনতে এবং UAV আগাছা ম্যাপিংয়ের সময় অপ্রাসঙ্গিক পটভূমি দূর করে এমন উপযুক্ত অ্যালগরিদমগুলির বিকাশ প্রয়োজন (Gaˇsparovi'c et al., 2020; Hamylton et al., 2020; H. Huang et al. , 2018, 2020; লোপেজ- ´ গ্রানাডোস এট আল।, 2016)। উদ্ভিদের স্বীকৃতি, পাতার শ্রেণিবিন্যাস এবং রোগের ম্যাপিং-এ শব্দার্থিক বিভাজন কৌশল গ্রহণের উপর অতিরিক্ত গবেষণা স্বাগত জানাই (ফুয়েন্তেস-পাচেকো এট আল।, 2019; কেরকেচ এট আল।, 2020)।
ক্লাস্টার 2. এই ক্লাস্টারের প্রকাশনাগুলি কৃষি ড্রোনের বিভিন্ন দিকের উপর দৃষ্টি নিবদ্ধ করে। রিমোট ফেনোটাইপিংয়ের সাথে সম্পর্কিত, শঙ্করন এট আল। (2015) জমিতে ফসলের দ্রুত ফিনোটাইপিংয়ের জন্য UAV-এর সাথে কম-উচ্চতা, উচ্চ-রেজোলিউশনের বায়বীয় ইমেজিং ব্যবহারের সম্ভাবনা পর্যালোচনা করেছে এবং তারা যুক্তি দেয় যে, স্থল-ভিত্তিক সেন্সিং প্ল্যাটফর্মের তুলনায়, পর্যাপ্ত সেন্সর সহ ছোট UAV গুলি বেশ কিছু সুবিধা দেয়। , যেমন ক্ষেত্রে সহজ অ্যাক্সেস, উচ্চ রেজোলিউশন ডেটা, দক্ষ ডেটা সংগ্রহ,
ক্ষেত্রের বৃদ্ধির অবস্থার দ্রুত মূল্যায়ন, এবং কম অপারেশনাল খরচ। যাইহোক, লেখকরা আরও উল্লেখ করেছেন যে ফিল্ড ফেনোটাইপিংয়ের জন্য UAV এর কার্যকর প্রয়োগ দুটি মৌলিক উপাদানের উপর নির্ভর করে, যথা, UAV বৈশিষ্ট্য (যেমন, নিরাপত্তা, স্থিতিশীলতা, অবস্থান, স্বায়ত্তশাসন) এবং সেন্সর বৈশিষ্ট্য (যেমন, রেজোলিউশন, ওজন, বর্ণালী তরঙ্গদৈর্ঘ্য, ক্ষেত্র দেখুন). হাঘিঘাটালব ইত্যাদি। (2016) UAV চিত্র থেকে প্লট-স্তরের ডেটা পুনরুদ্ধার করতে এবং প্রজনন প্রক্রিয়াকে ত্বরান্বিত করতে একটি আধা-স্বয়ংক্রিয় চিত্র প্রক্রিয়াকরণ পাইপলাইন প্রস্তাব করেছে। হলম্যান এট আল। (2016) একটি উচ্চ উন্নত
থ্রুপুট ফিল্ড ফেনোটাইপিং সিস্টেম এবং হাইলাইট করেছে যে UAV গুণমান, বিশাল, ক্ষেত্র-ভিত্তিক ফেনোটাইপিক ডেটা সংগ্রহ করতে সক্ষম এবং ডিভাইসটি বড় এলাকা এবং বিভিন্ন ক্ষেত্রের অবস্থান জুড়ে কার্যকর।
যেহেতু ফলন অনুমান তথ্যের একটি অবিশ্বাস্যভাবে গুরুত্বপূর্ণ অংশ, বিশেষ করে যখন সময়মতো উপলব্ধ থাকে, তখন UAV-এর জন্য সমস্ত ক্ষেত্রের পরিমাপ প্রদান করার এবং দক্ষতার সাথে উচ্চ-মানের ডেটা অর্জনের সম্ভাবনা রয়েছে (Daakir et al., 2017; Demir et al., 2018 ; Enciso et al., 2019; Kulbacki et al., 2018; Pudelko et al., 2012)। এই বিষয়ে, জিন এট আল। (2017) উত্থান পর্যায়ে গম গাছের ঘনত্ব অনুমান করার জন্য একটি পদ্ধতি বিকাশ এবং মূল্যায়ন করার জন্য খুব কম উচ্চতায় UAV দ্বারা প্রাপ্ত উচ্চ রেজোলিউশন চিত্রের সুবিধা গ্রহণ করেছে। লেখকদের মতে, ইউএভি ক্যামেরা দিয়ে সজ্জিত রোভার সিস্টেমের সীমাবদ্ধতা অতিক্রম করে এবং ফসলে উদ্ভিদের ঘনত্ব অনুমান করার জন্য একটি অ-আক্রমণাত্মক পদ্ধতির প্রতিনিধিত্ব করে, যা কৃষকদের মাটির ট্র্যাফিকবিলিটি থেকে স্বাধীন ফিল্ড ফিনোটাইপিংয়ের জন্য প্রয়োজনীয় উচ্চ থ্রুপুট অর্জন করতে দেয়। লি এট আল। (2016) ক্যানোপির উচ্চতা এবং মাটির উপরে বায়োমাস সহ ভুট্টার পরামিতিগুলি অনুমান করার জন্য একটি UAV-ভিত্তিক সিস্টেম ব্যবহার করে অত্যন্ত উচ্চ রেজোলিউশন সহ শত শত স্টেরিও চিত্র সংগ্রহ করেছে। অবশেষে, Yue et al. (2017) পাওয়া গেছে যে UAV থেকে নির্ধারিত ফসলের উচ্চতা স্থলভাগের বায়োমাস (AGB) অনুমানকে বাড়িয়ে তুলতে পারে।
শস্যের বৃদ্ধির উপর নজরদারি করার একটি পদ্ধতি হল ফসলের পৃষ্ঠের মডেল তৈরি করার ধারণা (Bendig et al., 2014, 2015; Holman et al., 2016; Panday, Shrestha, et al., 2020; Sumesh et al., 2021)। বেশ কয়েকটি গবেষণায় গাছের উচ্চতা ক্যাপচার করতে এবং তাদের বৃদ্ধির নিরীক্ষণের জন্য UAV থেকে তোলা চিত্রগুলির সম্ভাব্যতা তুলে ধরা হয়েছে। উদাহরণস্বরূপ, Bendig et al. (2013) UAV ব্যবহার করে 0.05 মিটারেরও কম উচ্চ রেজোলিউশন সহ মাল্টি-টেম্পোরাল ক্রপ সারফেস মডেলের উন্নয়ন বর্ণনা করেছে। তারা ফসল শনাক্ত করার লক্ষ্য ছিল
বৃদ্ধির পরিবর্তনশীলতা এবং ফসলের চিকিত্সা, চাষ এবং চাপের উপর এর নির্ভরতা। বেন্ডিগ এট আল। (2014) ফসলের পৃষ্ঠের মডেল থেকে আহরিত উদ্ভিদের উচ্চতার উপর ভিত্তি করে তাজা এবং শুষ্ক জৈববস্তু অনুমান করার জন্য UAV ব্যবহার করেছে এবং দেখা গেছে যে, বায়ুবাহিত প্ল্যাটফর্ম এবং টেরেস্ট্রিয়াল লেজার স্ক্যানিংয়ের বিপরীতে, UAV-এর উচ্চ রেজোলিউশনের চিত্রগুলি বিভিন্ন বৃদ্ধির জন্য উদ্ভিদের উচ্চতা মডেলিংয়ের নির্ভুলতা উল্লেখযোগ্যভাবে বৃদ্ধি করতে পারে। পর্যায়গুলি একই শিরায়, Geipel et al. (2014) চিত্র অর্জনের জন্য তাদের গবেষণায় UAV ব্যবহার করেছে
ভুট্টা শস্যের ফলন ভবিষ্যদ্বাণীর জন্য ডেটাসেটগুলি প্রথম থেকে মাঝামাঝি মরসুমের তিনটি ভিন্ন পর্যায়ে বৃদ্ধির ভবিষ্যদ্বাণী করে এবং এই উপসংহারে পৌঁছেছে যে বায়বীয় চিত্র এবং ফসলের পৃষ্ঠের মডেলগুলির উপর ভিত্তি করে বর্ণালী এবং স্থানিক মডেলিংয়ের সমন্বয় মধ্য-ঋতু ভুট্টার ফলনের পূর্বাভাস দেওয়ার জন্য একটি উপযুক্ত পদ্ধতি। অবশেষে, Gnadinger ¨ এবং Schmidhalter (2017) নির্ভুল ফেনোটাইপিংয়ে UAV-এর উপযোগিতা পরীক্ষা করেছেন এবং হাইলাইট করেছেন যে এই প্রযুক্তির ব্যবহার খামার ব্যবস্থাপনাকে উন্নত করতে পারে এবং প্রজনন ও কৃষি সংক্রান্ত উদ্দেশ্যে ক্ষেত্রের পরীক্ষা-নিরীক্ষা সক্ষম করতে পারে। সামগ্রিকভাবে, আমরা লক্ষ্য করেছি যে ক্লাস্টার 2-এর প্রকাশনাগুলি রিমোটে UAV-এর প্রধান সুবিধার উপর ফোকাস করে
ফেনোটাইপিং, ফলন অনুমান, ফসলের পৃষ্ঠের মডেলিং এবং উদ্ভিদ গণনা। ভবিষ্যতের অধ্যয়নগুলি দূরবর্তী ফিনোটাইপিংয়ের জন্য নতুন পদ্ধতিগুলি বিকাশের মাধ্যমে আরও গভীরভাবে খনন করতে পারে যা দূরবর্তীভাবে সংবেদিত ডেটা প্রক্রিয়াকরণকে স্বয়ংক্রিয় এবং অপ্টিমাইজ করতে পারে (বারাবাস্কি এট আল।, 2016; লিবিশ এট আল।, 2015; মোচিদা এট আল।, 2015; এস. ঝোউ এট আল। ., 2021)। এছাড়াও, UAV-তে লাগানো IoT সেন্সরগুলির কার্যকারিতা এবং তাদের খরচ, শ্রম, এবং ফলন অনুমানের নির্ভুলতার মধ্যে লেনদেন সম্পর্কে গবেষণা করা দরকার
ভবিষ্যত (Ju & Son, 2018a, 2018b; Xie & Yang, 2020; Yue et al., 2018)। পরিশেষে, দক্ষ ইমেজ প্রসেসিং পদ্ধতি বিকাশের প্রয়োজন রয়েছে যা নির্ভরযোগ্য তথ্য তৈরি করতে পারে, কৃষি উৎপাদনে দক্ষতা বাড়াতে পারে এবং কৃষকদের হাতে গণনা কাজ কমিয়ে দিতে পারে (RU Khan et al., 2021; Koh et al., 2021; Lin & Guo, 2020; C. Zhang et al., 2020)।
ক্লাস্টার 3. এই ক্লাস্টারের প্রকাশনাগুলি UAV প্ল্যাটফর্মগুলিতে ব্যবহৃত কৃষি সম্পদের দূরবর্তী সংবেদনের জন্য বিভিন্ন ধরণের ইমেজিং সিস্টেম নিয়ে আলোচনা করে। এই বিষয়ে, থার্মাল ইমেজিং ফসলের ক্ষতি রোধ করতে এবং খরার চাপ তাড়াতাড়ি সনাক্ত করতে পৃষ্ঠের তাপমাত্রা পর্যবেক্ষণের অনুমতি দেয় (Awais et al., 2022; García-Tejero et al., 2018; Sankaran et al., 2015; Santesteban et al., 2017; ইয়েওম, 2021)। বালুজা এট আল। (2012) জাহাজে মাল্টিস্পেকট্রাল এবং থার্মাল ক্যামেরার ব্যবহার জোরদার করেছে
UAV গবেষকদের উচ্চ রেজোলিউশনের ছবি পেতে এবং লতার জলের অবস্থা মূল্যায়ন করতে সক্ষম করেছে। এটি রিমোট সেন্সিং ডেটা ব্যবহার করে অভিনব জল নির্ধারণের মডেলগুলি বিকাশ করতে কার্যকর হতে পারে (বালুজা এট আল।, 2012)। কারণ
ইউএভি, রিবেইরো-গোমস এট আল-এর সীমিত লোড ক্ষমতা। (2017) গাছপালাগুলিতে জলের চাপ নির্ধারণের জন্য UAVS-এ ঠাণ্ডা না করা তাপীয় ক্যামেরাগুলির একীকরণ বিবেচনা করেছে, যা এই ধরণের UAV-কে ঐতিহ্যগত উপগ্রহ-ভিত্তিক রিমোট সেন্সিং এবং শীতল থার্মাল ক্যামেরা দিয়ে সজ্জিত UAV-এর তুলনায় আরও দক্ষ এবং কার্যকর করে তোলে। লেখকদের মতে, ঠাণ্ডা না করা থার্মাল ক্যামেরাগুলি ঠাণ্ডা করা ক্যামেরার চেয়ে হালকা, উপযুক্ত ক্রমাঙ্কন প্রয়োজন। গঞ্জালেজ-ডুগো এট আল। (2014) দেখিয়েছে যে তাপীয় চিত্রগুলি কার্যকরভাবে ফসলের জলের চাপের সূচকগুলির স্থানিক মানচিত্র তৈরি করে যাতে জলের অবস্থা মূল্যায়ন করা যায় এবং সাইট্রাস বাগানের মধ্যে এবং এর মধ্যে জলের চাপের পরিমাণ নির্ধারণ করা যায়৷ গঞ্জালেজ-ডুগো এট আল। (2013) এবং Santesteban et al. (2017) একটি বাণিজ্যিক বাগান এবং একটি দ্রাক্ষাক্ষেত্রের জলের অবস্থার পরিবর্তনশীলতা অনুমান করতে উচ্চ রেজোলিউশন UAV তাপীয় চিত্রের ব্যবহার তদন্ত করেছে৷
মাল্টিস্পেকট্রাল ইমেজিং প্রথাগত আরজিবি (লাল, সবুজ এবং নীল) চিত্রগুলির সাথে তুলনা করে ব্যাপক ডেটা সরবরাহ করতে পারে (Ad˜ ao et al., 2017; Navia et al., 2016)। এই বর্ণালী ডেটা, স্থানিক ডেটা সহ, শ্রেণীবিভাগ, ম্যাপিং, পূর্বাভাস, ভবিষ্যদ্বাণী এবং সনাক্তকরণের উদ্দেশ্যে সহায়তা করতে পারে (বার্নি এট আল।, 2009বি)। Candiago et al অনুযায়ী। (2015), UAV-ভিত্তিক মাল্টিস্পেকট্রাল ইমেজিং একটি নির্ভরযোগ্য এবং দক্ষ সম্পদ হিসাবে ফসল মূল্যায়ন এবং সুনির্দিষ্ট কৃষিতে ব্যাপকভাবে অবদান রাখতে পারে। এছাড়াও,
খালিক প্রমুখ। (2019) স্যাটেলাইট এবং UAV-ভিত্তিক মাল্টিস্পেকট্রাল ইমেজিংয়ের মধ্যে একটি তুলনা করেছে। UAV-ভিত্তিক চিত্রগুলি দ্রাক্ষাক্ষেত্রের পরিবর্তনশীলতা বর্ণনা করার পাশাপাশি ফসলের ছাউনির প্রতিনিধিত্ব করার জন্য প্রাণবন্ত মানচিত্রগুলিকে আরও সুনির্দিষ্ট করে তুলেছে। সংক্ষেপে, এই ক্লাস্টারের নিবন্ধগুলি কৃষি UAV-তে তাপীয় এবং মাল্টিস্পেকট্রাল ইমেজিং সেন্সরগুলির অন্তর্ভুক্তি নিয়ে আলোচনা করে। তদনুসারে, AI এর সাথে তাপীয় এবং মাল্টিস্পেকট্রাল ইমেজিং কীভাবে একত্রিত করা যায় তা বোঝার জন্য আরও গবেষণা প্রয়োজন
উদ্ভিদের চাপ সনাক্ত করার কৌশল (যেমন, গভীর শিক্ষা) (Ampatzidis et al., 2020; Ampatzidis & Partel, 2019; Jung et al., 2021; Santesteban et al., 2017; Syeda et al., 2021)। এই ধরনের অন্তর্দৃষ্টিগুলি আরও দক্ষ এবং সঠিক সনাক্তকরণ নিশ্চিত করার পাশাপাশি উদ্ভিদের বৃদ্ধি, স্ট্রেস এবং ফেনোলজি পর্যবেক্ষণ করতে সাহায্য করবে (Buters et al., 2019; Cao et al., 2020; Neupane & BaysalGurel, 2021; L. Zhou et al., 2020)।
ক্লাস্টার 4. এই ক্লাস্টারে সাতটি কাগজ রয়েছে যা কৃষি অনুশীলনকে সমর্থন করার ক্ষেত্রে বর্ণালী ইমেজিং এবং হাইপারস্পেকট্রাল ইমেজিংয়ের গুরুত্বপূর্ণ ভূমিকাকে ঘিরে। হাইপারস্পেকট্রাল ইমেজিং নিজেকে একটি রিমোট সেন্সিং পদ্ধতি হিসাবে প্রতিষ্ঠিত করেছে যা পৃথিবী সিস্টেমের পরিমাণগত মূল্যায়ন সক্ষম করে (Schaepman et al., 2009)। আরও সুনির্দিষ্টভাবে বলতে গেলে, এটি পৃষ্ঠের উপাদানগুলির সনাক্তকরণ, (আপেক্ষিক) ঘনত্বের পরিমাণ নির্ধারণ এবং পৃষ্ঠ উপাদান অনুপাত বরাদ্দ
মিশ্র পিক্সেলের মধ্যে (Kirsch et al., 2018; Zhao et al., 2022)। অন্য কথায়, হাইপারস্পেকট্রাল সিস্টেম দ্বারা প্রদত্ত উচ্চ বর্ণালী রেজোলিউশন বিভিন্ন পরামিতিগুলির আরও সঠিক অনুমান করতে সক্ষম করে, যেমন নিরামিষ বৈশিষ্ট্য বা পাতার জলের পরিমাণ (Suomalainen et al., 2014)। এই ক্লাস্টারের গবেষকরা এই ধরনের সিস্টেমের বিভিন্ন দিক তদন্ত করেছেন। অন্যদের মধ্যে, Aasen et al. (2015b) লাইটওয়েট থেকে ত্রি-মাত্রিক হাইপারস্পেকট্রাল তথ্য প্রাপ্ত করার জন্য একটি অনন্য পদ্ধতির প্রস্তাব করেছে
গাছপালা পর্যবেক্ষণের জন্য ইউএভিতে ব্যবহৃত স্ন্যাপশট ক্যামেরা। লুসিয়ার এট আল। (2014) একটি অভিনব হাইপারস্পেকট্রাল ইউএএস-এর নকশা, উন্নয়ন এবং বায়বীয় ক্রিয়াকলাপগুলির পাশাপাশি এটির সাথে সংগৃহীত চিত্র ডেটার ক্রমাঙ্কন, বিশ্লেষণ এবং ব্যাখ্যা নিয়ে আলোচনা করেছে। অবশেষে, Honkavaara et al. (2013b) FabryPerot ইন্টারফেরোমিটার-ভিত্তিক বর্ণালী চিত্রগুলির জন্য একটি ব্যাপক প্রক্রিয়াকরণ পদ্ধতির বিকাশ করেছে এবং নির্ভুল কৃষির জন্য একটি জৈববস্তু অনুমান পদ্ধতিতে এর ব্যবহার দেখিয়েছে। এই বর্তমান ক্লাস্টারের জন্য সম্ভাব্য ভবিষ্যত পথের মধ্যে রয়েছে সেন্সর প্রযুক্তির প্রযুক্তিগত উন্নতির প্রয়োজনীয়তার উপর জোর দেওয়া (Aasen et al., 2015b) সেইসাথে পরিপূরক প্রযুক্তি, বিশেষ করে বড় ডেটা এবং বিশ্লেষণ (Ang & Seng, 2021b) অন্তর্ভুক্ত করা এবং উন্নত করার প্রয়োজনীয়তা। -গ্রাম্যাটিকিস এট আল।, 2020; শাকুর এট আল।, 2019)। পরবর্তীটি মূলত স্মার্ট কৃষিতে প্রয়োগ করা বিভিন্ন সেন্সর দ্বারা উত্পন্ন ক্রমবর্ধমান ডেটা থেকে উদ্ভূত হয় (C. Li & Niu, 2020; A. Rejeb et al., 2022; Y. Su & Wang, 2021)।
ক্লাস্টার 5. এই ক্লাস্টারের প্রকাশনাগুলি ড্রোন-ভিত্তিক 3Dmapping অ্যাপ্লিকেশনগুলি পরীক্ষা করেছে৷ 3D ম্যাপিংয়ের জন্য ড্রোন ব্যবহার করা জটিল ফিল্ডওয়ার্ককে উপশম করতে পারে এবং দক্ষতা উল্লেখযোগ্যভাবে বৃদ্ধি করতে পারে (Torres-sanchez ´ et al., 2015)। ক্লাস্টারের পাঁচটি নিবন্ধ মূলত উদ্ভিদ পর্যবেক্ষণ অ্যাপ্লিকেশনের উপর দৃষ্টি নিবদ্ধ করে। উদাহরণস্বরূপ, ক্যানোপি এলাকা, গাছের উচ্চতা এবং মুকুটের আয়তন সম্পর্কে ত্রিমাত্রিক তথ্য পেতে, Torres-sanchez ´ et al. (2015) ডিজিটাল সারফেস মডেল তৈরি করতে UAV প্রযুক্তি ব্যবহার করেছে এবং তারপর অবজেক্ট-ভিত্তিক ইমেজ অ্যানালাইসিস (OBIA) পন্থা। আরও, জারকো-তেজাদা এট আল। (2014) UAV প্রযুক্তি এবং ত্রি-মাত্রিক ফটো-পুনঃনির্মাণ পদ্ধতি একত্রিত করে গাছের উচ্চতা পরিমাপ করা হয়েছে। জিমেনেজ-ব্রেনেস লোপেজ-গ্রানাডোস, ডি কাস্ত্রো, এবং অন্যান্য। (2017) উন্নত OBIA পদ্ধতির সাথে UAV প্রযুক্তিকে একীভূত করে বহু-সাময়িক, কয়েক ডজন জলপাই গাছের 3D পর্যবেক্ষণের জন্য একটি নতুন প্রক্রিয়া প্রদর্শন করেছে। এই ক্লাস্টারে ভবিষ্যতের কাজের জন্য আকর্ষণীয় পথের মধ্যে বর্তমানের উন্নতি অন্তর্ভুক্ত রয়েছে
পদ্ধতি (Zarco-Tejada et al., 2014) ডিজিটাল সারফেস মডেলিং উদ্দেশ্যে (Ajayi et al., 2017; Jaud et al., 2016), যেমন OBIA (de Castro et al., 2018, 2020; Ventura et al. , 2018), এবং ফটো পুনর্গঠন বা উন্নয়নশীল উপন্যাস পদ্ধতি (Díaz-Varela et al., 2015; Torres-S´ anchez et al., 2015)।
ক্লাস্টার 6. এই ক্লাস্টারটি কৃষি নজরদারিতে ড্রোনের ভূমিকা নিয়ে আলোচনা করে। UAVs স্যাটেলাইট এবং বিমানের ইমেজিংয়ের ত্রুটিগুলি পরিপূরক এবং কাটিয়ে উঠতে পারে। উদাহরণস্বরূপ, তারা কম জ্বালানি বা পাইলটিং চ্যালেঞ্জ সহ রিয়েল-টাইম ইমেজিংয়ের কাছাকাছি উচ্চ রেজোলিউশন প্রদান করতে পারে, যার ফলে ধ্রুবক এবং বাস্তব-সময় নজরদারি এবং সিদ্ধান্ত গ্রহণের উন্নতি হয় (এস. হারউইটজ এট আল।, 2004)। UAV-এর আরেকটি গুরুত্বপূর্ণ অবদান হল তাদের উচ্চ রেজোলিউশন হিসাবে নির্ভুল কৃষি বা সাইট-নির্দিষ্ট চাষের জন্য সাইট-নির্দিষ্ট ডেটা প্রদান করার ক্ষমতা, বিভিন্ন প্যারামিটার সম্পর্কে বিস্তারিত তথ্য কৃষকদের জমিকে সমজাতীয় অংশে ভাগ করতে এবং সেই অনুযায়ী তাদের সাথে আচরণ করতে সক্ষম করে (হান্ট এট আল। , 2010; CC Lelong et al., 2008; Primicerio et al., 2012)। এই ধরনের UAV-ভিত্তিক কৃষি নজরদারি খাদ্য নিরাপত্তা পর্যবেক্ষণ এবং সিদ্ধান্ত গ্রহণে সহায়তা করতে পারে (SR Herwitz et al., 2004)। কৃষি নজরদারিতে গবেষণার অগ্রগতির জন্য, শুধুমাত্র সেন্সর, ইউএভি এবং অন্যান্য সম্পর্কিত প্রযুক্তি এবং তাদের যোগাযোগ এবং ডেটা স্থানান্তর পদ্ধতির উন্নতির প্রয়োজন নেই (ইউইং এট আল।, 2020; শুয়াই এট আল।, 2019), বরং বিভিন্ন ড্রোনের সাথে একীভূত করা স্মার্ট এগ্রিকালচারের সাথে সম্পর্কিত বিভিন্ন কাজকে অপ্টিমাইজ করার জন্য প্রযুক্তি, যেমন মনিটরিং, কৃষি নজরদারি, এবং সিদ্ধান্ত গ্রহণ, একটি উচ্চ সম্ভাবনাময় গবেষণার ক্ষেত্র (আলসামহি এট আল।, 2021; পোপেস্কু এট আল।, 2020; ভুরান এট আল।, 2018)। এই বিষয়ে, IoT, WSNs এবং বড় ডেটা আকর্ষণীয় পরিপূরক ক্ষমতা প্রদান করে (van der Merwe et al., 2020)। বাস্তবায়ন খরচ, খরচ সঞ্চয়, শক্তি দক্ষতা, এবং ডেটা নিরাপত্তা এই ধরনের একীকরণের জন্য গবেষণার অধীন ক্ষেত্রগুলির মধ্যে রয়েছে (মাসরুর এট আল।, 2021)।
দেশ এবং একাডেমিক প্রতিষ্ঠান
চূড়ান্ত ধাপে মূল দেশের তদন্ত এবং লেখকদের একাডেমিক সংশ্লিষ্টতা অন্তর্ভুক্ত ছিল। এই বিশ্লেষণের মাধ্যমে, আমরা কৃষিতে ড্রোন প্রয়োগে অবদানকারী পণ্ডিতদের ভৌগলিক বিতরণকে আরও ভালভাবে বোঝার লক্ষ্য রাখি। দেশ এবং একাডেমিক প্রতিষ্ঠানের বৈচিত্র্য লক্ষ্য করা উল্লেখযোগ্য। দেশের দৃষ্টিকোণ থেকে, মার্কিন যুক্তরাষ্ট্র, চীন, ভারত এবং ইতালি প্রকাশনার সংখ্যার দিক থেকে তালিকার শীর্ষে রয়েছে (সারণী 7)। বর্তমান
কৃষি ড্রোনের উপর গবেষণা মূলত উত্তর আমেরিকা এবং এশীয় দেশগুলিতে কেন্দ্রীভূত, প্রধানত সঠিক কৃষি অ্যাপ্লিকেশনগুলিতে তাদের উচ্চ নিযুক্তির কারণে। উদাহরণস্বরূপ, মার্কিন যুক্তরাষ্ট্রে, 841.9 সালে কৃষি ড্রোনের বাজার 2020 মিলিয়ন মার্কিন ডলার অনুমান করা হয়েছিল, যা বিশ্বব্যাপী বাজারের প্রায় 30% অংশ (রিপোর্টলিঙ্কার, 2021)। বিশ্বের বৃহত্তম অর্থনীতি হিসাবে র্যাঙ্কিং, চীন 2.6 সালে আনুমানিক বাজারের আকার 2027 বিলিয়ন মার্কিন ডলারে পৌঁছানোর পূর্বাভাস দেওয়া হয়েছে। এই দেশটি উত্পাদনশীলতার সমস্যাগুলি কাটিয়ে উঠতে এবং ভাল ফলন, শ্রম উপশম এবং কম উৎপাদন ইনপুট অর্জনের জন্য কৃষি ড্রোনের জন্য আবেদন করছে। যাইহোক, চীনে প্রযুক্তি গ্রহণ করা জনসংখ্যার আকার এবং বিদ্যমান শস্য ব্যবস্থাপনা অনুশীলনের উদ্ভাবন ও উন্নতির প্রয়োজনীয়তার মতো কারণগুলির দ্বারা চালিত হয়।
শীর্ষস্থানীয় উৎপাদনশীল দেশ এবং বিশ্ববিদ্যালয়/সংস্থা যা অবদান রাখে
কৃষি ড্রোন-সম্পর্কিত গবেষণা।
| মর্যাদাক্রম | দেশে |
| 1 | মার্কিন |
| 2 | চীন |
| 3 | ভারত |
| 4 | ইতালি |
| 5 | স্পেন |
| 6 | জার্মানি |
| 7 | ব্রাজিল |
| 8 | অস্ট্রেলিয়া |
| 9 | জাপান |
| 10 | যুক্তরাজ্য |
| মর্যাদাক্রম | বিশ্ববিদ্যালয়/সংস্থা |
| 1 | চীনা বিজ্ঞান একাডেমি |
| 2 | গণপ্রজাতন্ত্রী চীনের কৃষি মন্ত্রণালয় |
| 3 | সুপেরিয়র কাউন্সিল অফ সায়েন্টিফিক ইনভেস্টিগেশন |
| 4 | টেক্সাস এন্ড এম ইউনিভার্সিটি |
| 5 | চীন কৃষি বিশ্ববিদ্যালয় |
| 6 | ইউএসডিএ কৃষি গবেষণা পরিষেবা |
| 7 | CSIC – Instituto de Agricultura Sostenible IAS |
| 8 | পারডু বিশ্ববিদ্যালয় |
| 9 | জাতীয় গবেষণাগার পরিষদ |
| 10 | দক্ষিণ চীন কৃষি বিশ্ববিদ্যালয় |
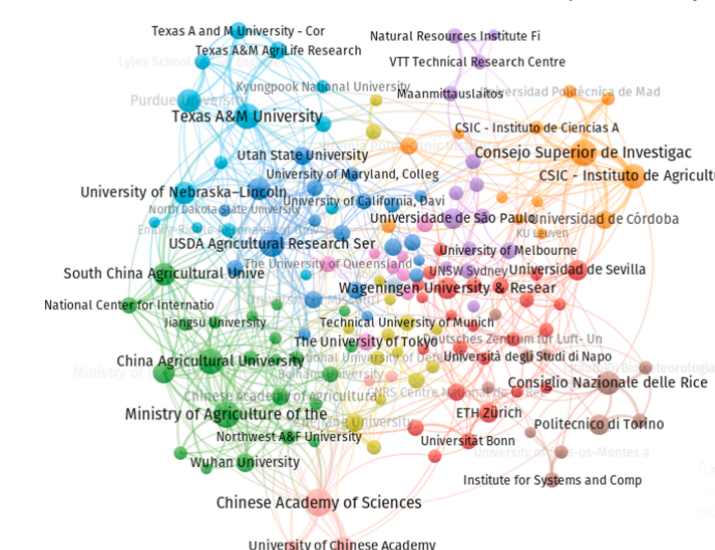
একটি বিশ্ববিদ্যালয় এবং সাংগঠনিক দৃষ্টিকোণ থেকে, চাইনিজ একাডেমি অফ সায়েন্সেস প্রকাশনার সংখ্যার দিক থেকে তালিকার শীর্ষে রয়েছে, তারপরে গণপ্রজাতন্ত্রী চীনের কৃষি মন্ত্রণালয় এবং কনসেজো সুপিরিয়র ডি ইনভেস্টিগাসিওনেস সাইন্টিফিকাস। চাইনিজ একাডেমি অফ সায়েন্সেসের প্রতিনিধিত্ব করেছেন লেখক লিয়াও জিয়াওহান এবং লি জুন; হান ওয়েনটিং গণপ্রজাতন্ত্রী চীনের কৃষি মন্ত্রণালয়ের প্রতিনিধিত্ব করেন; এবং Consejo Superior de Investigaciones Científicas প্রতিনিধিত্ব করেছেন লোপেজ-গ্রানাডোস, ´এফ. এবং পেনা, ˜ জোসে মারিয়া এস. মার্কিন যুক্তরাষ্ট্র থেকে, টেক্সাস এএন্ডএম ইউনিভার্সিটি এবং পারডু ইউনিভার্সিটির মতো বিশ্ববিদ্যালয়গুলি তাদের
উল্লেখ সর্বাধিক সংখ্যক প্রকাশনা সহ বিশ্ববিদ্যালয় এবং তাদের সংযোগ চিত্র 4-এ দেখানো হয়েছে। উপরন্তু, এই তালিকায় কনসিগ্লিও নাজিওনালে ডেলে রিসারচে এবং কনসেজো সুপিরিয়র ডি ইনভেস্টিগাসিওনেস সাইন্টিফিকাসের মতো প্রতিষ্ঠানগুলিকে অন্তর্ভুক্ত করা হয়েছে যারা বৈজ্ঞানিক গবেষণায় সক্রিয়, কিন্তু একাডেমিক প্রতিষ্ঠান নয়। .
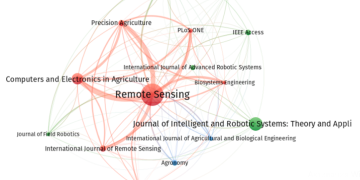
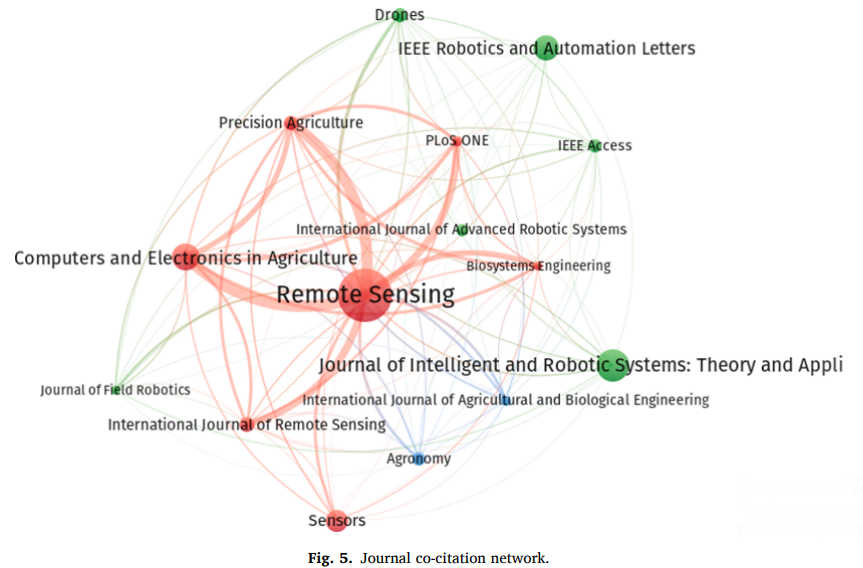
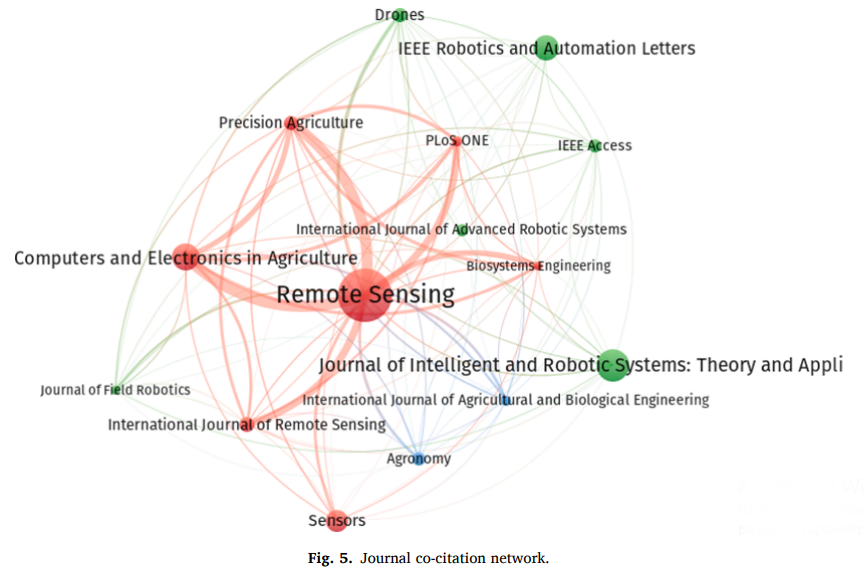
আমাদের নির্বাচনের মধ্যে বিভিন্ন ধরণের জার্নাল রয়েছে, যা কার্যত উপলব্ধ সমস্ত ডেটাকে অন্তর্ভুক্ত করে। সারণি 8 এ দেখানো হয়েছে, 258টি নিবন্ধ সহ রিমোট সেন্সিং শীর্ষে রয়েছে, তারপরে জার্নাল অফ ইন্টেলিজেন্ট অ্যান্ড রোবোটিক সিস্টেমস: 126টি থিওরি এবং অ্যাপ্লিকেশন এবং 98টি নিবন্ধ সহ কৃষিতে কম্পিউটার এবং ইলেকট্রনিক্স রয়েছে৷ যদিও রিমোট সেন্সিং মূলত ড্রোনের প্রয়োগ এবং বিকাশের উপর দৃষ্টি নিবদ্ধ করে, কৃষিতে কম্পিউটার এবং ইলেকট্রনিক্স প্রধানত কম্পিউটার হার্ডওয়্যার, সফ্টওয়্যার, ইলেকট্রনিক্স এবং কৃষিতে নিয়ন্ত্রণ ব্যবস্থার অগ্রগতি কভার করে। ক্রস-এরিয়া আউটলেটগুলি, যেমন 87টি প্রকাশনা সহ IEEE রোবোটিক্স এবং অটোমেশন লেটার্স এবং 34টি প্রকাশনা সহ IEEE অ্যাক্সেস, এছাড়াও ক্ষেত্রের প্রধান আউটলেট। শীর্ষ পনেরটি আউটলেট 959টি নথি সহ সাহিত্যে অবদান রেখেছে, যা সমস্ত প্রকাশনার প্রায় 20.40%। একটি জার্নাল সহ-উদ্ধৃতি বিশ্লেষণ আমাদের প্রকাশনার মধ্যে গুরুত্ব এবং মিল পরীক্ষা করতে সক্ষম করে। সহ-উদ্ধৃতি বিশ্লেষণে তিনটি ক্লাস্টার পাওয়া যায়, যেমনটি চিত্র 5-এ দেখানো হয়েছে। লাল ক্লাস্টারে রিমোট সেন্সিং, কম্পিউটার এবং ইলেকট্রনিক্স ইন এগ্রিকালচার, সেন্সর, ইত্যাদি জার্নাল রয়েছে।
এবং ইন্টারন্যাশনাল জার্নাল অফ রিমোট সেন্সিং। এই সমস্ত আউটলেটগুলি রিমোট সেন্সিং এবং নির্ভুল কৃষির ক্ষেত্রে অত্যন্ত স্বনামধন্য জার্নাল। সবুজ ক্লাস্টারে এমন জার্নাল রয়েছে যা রোবোটিক্স নিয়ে কাজ করে, যেমন জার্নাল অফ ইন্টেলিজেন্ট অ্যান্ড রোবোটিক সিস্টেমস: থিওরি অ্যান্ড অ্যাপ্লিকেশন, আইইইই রোবোটিক্স অ্যান্ড অটোমেশন লেটারস, আইইইই অ্যাক্সেস এবং ড্রোন। এই আউটলেটগুলি বেশিরভাগই অটোমেশন সম্পর্কিত কাগজপত্র প্রকাশ করে এবং কৃষি প্রকৌশলীদের জন্য দরকারী। চূড়ান্ত ক্লাস্টারটি কৃষিবিদ্যা এবং কৃষি প্রকৌশল সম্পর্কিত জার্নাল দ্বারা গঠিত হয়, যেমন অ্যাগ্রোনমি এবং ইন্টারন্যাশনাল জার্নাল অফ এগ্রিকালচারাল অ্যান্ড বায়োলজিক্যাল ইঞ্জিনিয়ারিং।
কৃষি ড্রোন-সম্পর্কিত গবেষণায় শীর্ষ 15টি জার্নাল।
| মর্যাদাক্রম | রোজনামচা | গণনা |
| 1 | রিমোট সেন্সিং | 258 |
| 2 | বুদ্ধিমান এবং রোবোটিক সিস্টেমের জার্নাল: থিওরি এবং অ্যাপ্লিকেশন | 126 |
| 3 | কৃষিতে কম্পিউটার এবং ইলেকট্রনিক্স | 98 |
| 4 | IEEE রোবোটিক্স এবং অটোমেশন লেটার | 87 |
| 5 | সেন্সর | 73 |
| 6 | ইন্টারন্যাশনাল জার্নাল অফ রিমোট সেন্সিং | 42 |
| 7 | যথার্থ কৃষি | 41 |
| 8 | ড্রোন | 40 |
| 9 | চাষ-বাস | 34 |
| 10 | IEEE অ্যাক্সেস | 34 |
| 11 | ইন্টারন্যাশনাল জার্নাল অফ অ্যাডভান্সড রোবোটিক সিস্টেম | 31 |
| 12 | ইন্টারন্যাশনাল জার্নাল অফ এগ্রিকালচার অ্যান্ড বায়োলজিক্যাল ইঞ্জিনিয়ারিং | 25 |
| 13 | প্লাস এক | 25 |
| 14 | জার্নাল অফ ফিল্ড রোবোটিক্স | 23 |
| 15 | বায়োসিস্টেম ইঞ্জিনিয়ারিং | 23 |
উপসংহার
সারাংশ
এই গবেষণায়, আমরা কৃষি ড্রোনের উপর বিদ্যমান গবেষণার সংক্ষিপ্ত ও বিশ্লেষণ করেছি। বিভিন্ন বাইবলিওমেট্রিক কৌশল প্রয়োগ করে, আমরা কৃষি ড্রোন-সম্পর্কিত গবেষণার বৌদ্ধিক কাঠামোর আরও ভাল বোঝার জন্য প্রচেষ্টা করেছি। সংক্ষেপে, আমাদের পর্যালোচনা সাহিত্যে কীওয়ার্ডগুলি সনাক্ত করে এবং আলোচনা করে, ড্রোনের ক্ষেত্রে শব্দার্থগতভাবে অনুরূপ সম্প্রদায় গঠন করার সময় জ্ঞানের ক্লাস্টারগুলি প্রকাশ করে, আগের গবেষণার রূপরেখা তৈরি করে এবং ভবিষ্যতের গবেষণার দিকনির্দেশের পরামর্শ দিয়ে বেশ কয়েকটি অবদানের প্রস্তাব দেয়। নীচে, আমরা কৃষি ড্রোনগুলির বিকাশের পর্যালোচনার মূল ফলাফলগুলিকে রূপরেখা দিই:
• সামগ্রিক সাহিত্য গত দশকে দ্রুত বৃদ্ধি পেয়েছে এবং প্রচুর মনোযোগ আকর্ষণ করেছে, যা 2012 সালের পরে নিবন্ধের সংখ্যা বৃদ্ধি দ্বারা নির্দেশিত হয়েছে। যদিও এই জ্ঞান ক্ষেত্রটি এখনও তার সম্পূর্ণ পরিপক্কতা অর্জন করতে পারেনি (ব্যারিয়েন্টস এট আল।, 2011; মেস & Steppe, 2019), বেশ কিছু প্রশ্নের উত্তর এখনও পাওয়া যায়নি। উদাহরণস্বরূপ, ইনডোর ফার্মিংয়ে ড্রোনের উপযোগিতা এখনও বিতর্কের জন্য উন্মুক্ত (আসলান এট আল।, 2022; ক্রুল এট আল।, 2021; রোল্ড' এট আল।, 2015)। ক্ষেত্রের দৃশ্যের জটিলতা এবং বিভিন্ন ইমেজিং পরিস্থিতি (যেমন, ছায়া এবং আলোকসজ্জা) উচ্চতর বর্ণালী ইন-ক্লাস বৈচিত্র্যের কারণ হতে পারে (ইয়াও এট আল।, 2019)। এমনকি পরবর্তী গবেষণার পর্যায়গুলিতেও, গবেষকদেরকে নির্দিষ্ট পরিস্থিতিতে এবং প্রয়োজনীয় চিত্রের গুণমান অনুসারে সর্বোত্তম ফ্লাইট পরিকল্পনা নির্ধারণ করার জন্য চ্যালেঞ্জ করা হয়েছে (সোরেস এট আল।, 2021; Tu et al.,
2020).
• আমরা লক্ষ্য করছি যে ক্ষেত্রটি দক্ষ UAV সিস্টেমের বিকাশ থেকে AI কৌশলগুলিকে অন্তর্ভুক্ত করার জন্য অগ্রগতি করেছে, যেমন মেশিন লার্নিং এবং কৃষি ড্রোনের ডিজাইনে গভীর শিক্ষা (Bah et al., 2018; Kitano et al., 2019; Maimaitijiang et al. , 2020; Mazzia et al., 2020; Tetila et al., 2020)।
• কৃষি ড্রোনের গবেষণায় প্রধানত পরিবেশগত পর্যবেক্ষণ, শস্য ব্যবস্থাপনা, এবং আগাছা ব্যবস্থাপনা (ক্লাস্টার 1) এর পাশাপাশি দূরবর্তী ফেনোটাইপিং এবং ফলন অনুমান (ক্লস্টার 2) প্রযুক্তির সম্ভাবনাগুলি অন্বেষণ করে রিমোট সেন্সিং নিয়ে আলোচনা করা হয়েছে। কৃষি ড্রোনের উপর প্রভাবশালী গবেষণার একটি সেট অন্তর্ভুক্ত Austin (2010), Berni et al. (2009)a, Herwitz et al. (2004), Nex and Remondino (2014), এবং Zhang and Kovacs (2012)। এই গবেষণাগুলি কৃষির প্রেক্ষাপটে ড্রোন-সম্পর্কিত গবেষণার ধারণাগত ভিত্তি তৈরি করেছে।
• পদ্ধতির সাথে সম্পর্কিত, আমরা লক্ষ্য করেছি যে এখনও পর্যন্ত করা বেশিরভাগ গবেষণাই সিস্টেম ডিজাইন, ধারণাগত, বা পর্যালোচনা-ভিত্তিক গবেষণার সমন্বয়ে গঠিত হয়েছে (Inoue, 2020; Nex & Remondino, 2014; P'erez-Ortiz et al. , 2015; ইয়াও এট আল।, 2019)। আমরা কৃষি ড্রোনের তদন্তের ক্ষেত্রে অভিজ্ঞতামূলক, গুণগত এবং কেস-স্টাডি-ভিত্তিক পদ্ধতির অভাবও লক্ষ্য করি।
• সম্প্রতি, নির্ভুল কৃষি, এআই কৌশল, নির্ভুল ভিটিকালচার, এবং জলের চাপের মূল্যায়ন সম্পর্কিত বিষয়গুলি যথেষ্ট মনোযোগ আকর্ষণ করেছে (Espinoza et al., 2017; Gomez-Cand ´ et al., 2016; Matese et al., 2015; Matese & Di Gennaro, 2018, 2021; Z. Zhou et al., 2021)। 1990-2010 এবং 2011-2021, দুটি পৃথক যুগে গবেষণা ক্লাস্টারগুলির যত্ন সহকারে পরীক্ষা, ডোমেনের বৌদ্ধিক কাঠামোর অগ্রগতি প্রকাশ করে। 1990 থেকে 2010 পর্যন্ত সময়কাল কেন্দ্রীয় ধারণা এবং ড্রোনের ধারণাগুলির বিল্ড আপ গঠন করেছিল, যা UAV ডিজাইন, উন্নয়ন এবং বাস্তবায়নের আলোচনা থেকে স্পষ্ট। দ্বিতীয় যুগে, গবেষণার ফোকাস পূর্বের অধ্যয়নের উপর প্রসারিত হয়, যা কৃষিতে UAV ব্যবহারের ক্ষেত্রে সংশ্লেষিত করার প্রচেষ্টা করে। আমরা এমন অনেক গবেষণাও পেয়েছি যা ইমেজিং কাজ এবং নির্ভুল কৃষিতে ড্রোন অ্যাপ্লিকেশন নিয়ে আলোচনা করে।
| মর্যাদাক্রম | রোজনামচা | গণনা |
| 1 | রিমোট সেন্সিং | 258 |
| 2 | বুদ্ধিমান এবং রোবোটিক সিস্টেমের জার্নাল: থিওরি এবং | 126 |
| অ্যাপ্লিকেশন | ||
| 3 | কৃষিতে কম্পিউটার এবং ইলেকট্রনিক্স | 98 |
| 4 | IEEE রোবোটিক্স এবং অটোমেশন লেটার | 87 |
| 5 | সেন্সর | 73 |
| 6 | ইন্টারন্যাশনাল জার্নাল অফ রিমোট সেন্সিং | 42 |
| 7 | যথার্থ কৃষি | 41 |
| 8 | ড্রোন | 40 |
| 9 | চাষ-বাস | 34 |
| 10 | IEEE অ্যাক্সেস | 34 |
| 11 | ইন্টারন্যাশনাল জার্নাল অফ অ্যাডভান্সড রোবোটিক সিস্টেম | 31 |
| 12 | ইন্টারন্যাশনাল জার্নাল অফ এগ্রিকালচার অ্যান্ড বায়োলজিক্যাল ইঞ্জিনিয়ারিং | 25 |
| 13 | প্লাস এক | 25 |
| 14 | জার্নাল অফ ফিল্ড রোবোটিক্স | 23 |
| 15 | বায়োসিস্টেম ইঞ্জিনিয়ারিং | 22 |
অনুমানসমূহ
আমাদের বাইবলিওমেট্রিক পর্যালোচনাটি পণ্ডিত, কৃষক, কৃষি বিশেষজ্ঞ, শস্য পরামর্শদাতা এবং ইউএভি সিস্টেম ডিজাইনারদের মাথায় রেখে ডিজাইন এবং পরিচালিত হয়েছিল। লেখকদের সর্বোত্তম জ্ঞানের জন্য, এটি প্রথম মৌলিক পর্যালোচনাগুলির মধ্যে একটি যা একটি গভীরভাবে বিবলিওমেট্রিক বিশ্লেষণ করেছে
কৃষিতে ড্রোন অ্যাপ্লিকেশন। আমরা এই জ্ঞান সংস্থার একটি বিস্তৃত পর্যালোচনা পরিচালনা করেছি, প্রকাশনাগুলির উদ্ধৃতি এবং সহ-উদ্ধৃতি বিশ্লেষণ নিযুক্ত করেছি। ড্রোন গবেষণার বৌদ্ধিক কাঠামো বর্ণনা করার জন্য আমাদের প্রচেষ্টাও শিক্ষাবিদদের জন্য নতুন অন্তর্দৃষ্টি প্রদান করে। সময়ের সাথে সাথে ব্যবহৃত কীওয়ার্ডগুলির একটি সতর্ক পর্যালোচনা ড্রোন-সম্পর্কিত সাহিত্যে হটস্পট এবং ফোকাল গবেষণা ক্ষেত্রগুলি প্রকাশ করে। তদ্ব্যতীত, আমরা ক্ষেত্রের সবচেয়ে প্রভাবশালী গবেষণা কাজগুলি সনাক্ত করতে সর্বাধিক উদ্ধৃত অধ্যয়নের একটি তালিকা উপস্থাপন করি। নিবন্ধ এবং কীওয়ার্ডগুলির সনাক্তকরণ ফলস্বরূপ ভবিষ্যতের অধ্যয়নের জন্য বিভিন্ন উপায় উন্মোচন করার জন্য একটি কঠিন সূচনা বিন্দু প্রদান করতে পারে।
গুরুত্বপূর্ণভাবে, আমরা ক্লাস্টারগুলি প্রকাশ করেছি যা তুলনামূলক কাজগুলিকে শ্রেণীবদ্ধ করে এবং ফলাফলগুলি বিশদভাবে বর্ণনা করে। ক্লাস্টারে শ্রেণীবদ্ধ অধ্যয়নগুলি UAV গবেষণার বৌদ্ধিক কাঠামো বুঝতে সহায়তা করে। উল্লেখযোগ্যভাবে, আমরা গবেষণার অভাব আবিষ্কার করেছি যা ড্রোন গ্রহণের কারণগুলি তদন্ত করে
এবং কৃষি কার্যক্রমে বাধা (সারণী 9 দেখুন)। ভবিষ্যত গবেষকরা অভিজ্ঞতামূলক তদন্ত পরিচালনা করে এই সম্ভাব্য ব্যবধানটি সমাধান করতে পারে যা বিভিন্ন কৃষি কার্যক্রম এবং জলবায়ু পরিস্থিতিতে ড্রোন গ্রহণের কারণগুলিকে মূল্যায়ন করে। তদুপরি, ড্রোনের কার্যকারিতা সম্পর্কিত কেস স্টাডি-ভিত্তিক গবেষণাকে ক্ষেত্র থেকে প্রকৃত ডেটা দিয়ে সমর্থন করা উচিত। এছাড়াও, একাডেমিক গবেষণায় কৃষক এবং পরিচালকদের জড়িত করা ড্রোন গবেষণার তাত্ত্বিক এবং ব্যবহারিক অগ্রগতির জন্য সুবিধাজনক হবে। আমরা সবচেয়ে বিশিষ্ট গবেষক এবং তাদের অবদানগুলি সনাক্ত করতে সক্ষম হয়েছি, যা মূল্যবান কারণ সাম্প্রতিক সেমিনাল কাজের সচেতনতা ভবিষ্যতের একাডেমিক প্রচেষ্টার জন্য কিছু নির্দেশনা দিতে পারে।
ছক 9
UAV গ্রহণের বাধা।
| বাধা | বিবরণ |
| তথ্য নিরাপত্তা | সাইবার নিরাপত্তা বাস্তবায়নের জন্য একটি বড় চ্যালেঞ্জ IoT সমাধান (মাসরুর এট আল।, 2021)। |
| ইন্টারঅপারেবিলিটি এবং ইন্টিগ্রেশন | বিভিন্ন প্রযুক্তি যেমন UAV, WSN, IoT ইত্যাদি। একত্রিত করা উচিত এবং ডেটা প্রেরণ করা উচিত যা জটিলতার মাত্রা বৃদ্ধি করুন (আলসামহি এট আল।, 2021; পোপেস্কু এট আল।, 2020; ভুরান এট আল।, 2018)। |
| বাস্তবায়ন খরচ | এটি বিশেষভাবে ছোট কৃষকদের ক্ষেত্রে এবং জন্য বিভিন্ন অত্যাধুনিক প্রযুক্তি একীভূত করা ( মাসরুর এট আল।, 2021)। |
| শ্রম জ্ঞান এবং ল্যাপারোস্কোপিক পদ্ধতি | ইউএভি চালানোর জন্য দক্ষ ড্রোন পাইলট প্রয়োজন। এছাড়াও, বিভিন্ন কাটিয়া প্রান্ত বাস্তবায়ন প্রযুক্তির জন্য দক্ষ শ্রমিক প্রয়োজন (YB Huang এট আল।, 2013; Tsouros et al., 2019)। |
| ইঞ্জিন শক্তি এবং ফ্লাইট স্থিতিকাল | ড্রোন দীর্ঘ সময় ধরে চালানো যায় না বৃহৎ এলাকা (হার্ডিন এবং হার্ডিন, 2010; লালিবার্ট এট আল।, 2007). |
| স্থিতিশীলতা, নির্ভরযোগ্যতা, এবং কসরত | খারাপ আবহাওয়ার সময় ড্রোন স্থিতিশীল থাকে না (হার্ডিন এবং হার্ডিন, 2010; লালিবার্তে এট আল।, 2007)। |
| পেলোড সীমাবদ্ধতা এবং সেন্সর এর গুণমান | ড্রোন শুধুমাত্র সীমিত লোড বহন করতে পারে নিম্নমানের সেন্সর লোড করার ক্ষমতা (Nebiker et al।, 2008)। |
| প্রবিধান | ড্রোন যেমন বিপজ্জনক হতে পারে, তেমনি মারাত্মকও হতে পারে কিছু এলাকায় প্রবিধান (Hardin & Jensen, 2011; লালিবার্তে এবং রাঙ্গো, 2011)। |
| কৃষকদের জ্ঞান এবং স্বার্থ | অন্যান্য অত্যাধুনিক প্রযুক্তির মতো, ড্রোন' সফল বাস্তবায়ন দক্ষতা প্রয়োজন এবং এছাড়াও অনিশ্চয়তার সাথে (ফিশার এট আল।, 2009; ল্যাম্বার্ট এট আল।, 2004; স্টাফোর্ড, 2000)। |
যেহেতু ফলন সর্বাধিক করার জন্য উপলব্ধ সংস্থানগুলি দক্ষতার সাথে ব্যবহার করার একটি ধ্রুবক প্রয়োজন রয়েছে, তাই কৃষকরা তাদের ক্ষেত্রগুলির দ্রুত, নির্ভুল এবং সাশ্রয়ী মূল্যের স্ক্যানিং নিশ্চিত করতে ড্রোনের সুবিধা নিতে পারে। প্রযুক্তিটি কৃষকদের তাদের ফসলের অবস্থা নির্ধারণ করতে এবং পানির অবস্থা, পাকার পর্যায়, পোকামাকড়ের উপদ্রব এবং পুষ্টির চাহিদা মূল্যায়ন করতে সহায়তা করতে পারে। ড্রোনের রিমোট সেন্সিং ক্ষমতা কৃষকদের প্রাথমিক পর্যায়ে সমস্যাগুলির পূর্বাভাস দেওয়ার জন্য এবং তাত্ক্ষণিকভাবে উপযুক্ত হস্তক্ষেপ করতে গুরুত্বপূর্ণ তথ্য সরবরাহ করতে পারে। যাইহোক, প্রযুক্তির সুবিধাগুলি তখনই উপলব্ধি করা যেতে পারে যদি চ্যালেঞ্জগুলি সঠিকভাবে মোকাবেলা করা যায়। এর আলোকে
ডেটা নিরাপত্তা, সেন্সর প্রযুক্তি সংক্রান্ত বর্তমান সমস্যাগুলি (যেমন, পরিমাপের নির্ভরযোগ্যতা বা নির্ভুলতা), একীকরণের জটিলতা, এবং যথেষ্ট বাস্তবায়ন খরচ, ভবিষ্যত অধ্যয়নগুলিকে অবশ্যই কৃষি ড্রোন এবং অন্যান্য কাটিয়া সংহত করার প্রযুক্তিগত, অর্থনৈতিক এবং অপারেশনাল সম্ভাব্যতা পরীক্ষা করতে হবে- প্রান্ত প্রযুক্তি।
সীমাবদ্ধতা
আমাদের গবেষণায় বিভিন্ন সীমাবদ্ধতা উপস্থিত রয়েছে। প্রথমত, ফলাফলগুলি চূড়ান্ত বিশ্লেষণের জন্য নির্বাচিত প্রকাশনা দ্বারা নির্ধারিত হয়। কৃষি ড্রোন সম্পর্কিত সমস্ত প্রাসঙ্গিক গবেষণা ক্যাপচার করা চ্যালেঞ্জিং, বিশেষ করে যেগুলি স্কোপাস ডাটাবেসে সূচিত করা হয়নি। আরও, তথ্য সংগ্রহের প্রক্রিয়াটি অনুসন্ধান কীওয়ার্ডের সেটিং এর মধ্যে সীমাবদ্ধ, যা অন্তর্ভুক্ত নাও হতে পারে এবং অনিয়মিত ফলাফলের দিকে নিয়ে যেতে পারে। এইভাবে, ভবিষ্যতের অধ্যয়নগুলি তৈরি করতে ডেটা সংগ্রহের অন্তর্নিহিত সমস্যাটির দিকে আরও মনোযোগ দিতে হবে
আরো নির্ভরযোগ্য উপসংহার। আরেকটি সীমাবদ্ধতা হল কম সংখ্যক উদ্ধৃতি সহ নতুন প্রকাশনা নিয়ে। বাইবলিওমেট্রিক বিশ্লেষণ পূর্ববর্তী প্রকাশনাগুলির প্রতি পক্ষপাতদুষ্ট কারণ তারা বছরের পর বছর ধরে আরও উদ্ধৃতি পেতে থাকে। সাম্প্রতিক গবেষণায় মনোযোগ আকর্ষণ করতে এবং উদ্ধৃতি সংগ্রহ করতে একটি নির্দিষ্ট সময় প্রয়োজন। ফলস্বরূপ, সাম্প্রতিক অধ্যয়নগুলি যা একটি দৃষ্টান্ত পরিবর্তন করে তা শীর্ষ দশটি প্রভাবশালী কাজের মধ্যে স্থান পাবে না। কৃষি ড্রোনের মতো দ্রুত উদীয়মান গবেষণা ডোমেনের পরীক্ষায় এই সীমাবদ্ধতা প্রচলিত। যেহেতু আমরা এই কাজের জন্য সাহিত্য অধ্যয়নের জন্য স্কোপাসের সাথে পরামর্শ করেছি, ভবিষ্যতের গবেষকরা ভিন্ন বিবেচনা করতে পারেন
ডাটাবেস, যেমন ওয়েব অফ সায়েন্স এবং IEEE এক্সপ্লোর, দিগন্ত প্রসারিত করতে এবং গবেষণা কাঠামো উন্নত করতে।
সম্ভাব্য বাইবলিওমেট্রিক অধ্যয়নগুলি অভিনব অন্তর্দৃষ্টি তৈরি করতে কনফারেন্স পেপার, অধ্যায় এবং বইয়ের মতো অন্যান্য গুরুত্বপূর্ণ জ্ঞানের উত্স বিবেচনা করতে পারে। ম্যাপিং এবং কৃষি ড্রোনের উপর বিশ্বব্যাপী প্রকাশনাগুলি তদন্ত করা সত্ত্বেও, আমাদের অনুসন্ধানগুলি বিশ্ববিদ্যালয়গুলির পণ্ডিত ফলাফলের পিছনে কারণগুলি প্রকাশ করেনি। এটি গুণগতভাবে ব্যাখ্যা করার জন্য গবেষণার একটি অভিনব ক্ষেত্র তৈরি করে যে কেন কিছু বিশ্ববিদ্যালয় কৃষি বিষয়ে গবেষণার ক্ষেত্রে অন্যদের তুলনায় বেশি উত্পাদনশীল।
ড্রোন এছাড়াও, ভবিষ্যত গবেষণাগুলি বিভিন্ন উপায়ে কৃষিকাজের স্থায়িত্ব বাড়ানোর জন্য ড্রোনের সম্ভাব্যতার অন্তর্দৃষ্টি প্রদান করতে পারে যেমন পরিবেশ পর্যবেক্ষণ, ফসল ব্যবস্থাপনা, এবং আগাছা ম্যাপিং যেমন বেশ কিছু গবেষক দ্বারা নির্দেশিত হয়েছে (চামুয়াহ ও সিং, 2019; ইসলাম এট আল।, 2021; Popescu et al., 2020; J. Su, Liu, et al., 2018b)। যেহেতু উচ্চ সংখ্যক নির্বাচিত কাগজপত্রের কারণে পাঠ্য বিশ্লেষণ করা সম্ভব হয়নি, তাই পদ্ধতিগত সাহিত্য পর্যালোচনার প্রয়োজন রয়েছে যা পরীক্ষা করে
ব্যবহৃত গবেষণা পদ্ধতি এবং পূর্ববর্তী গবেষণায় কৃষকদের সম্পৃক্ততা। সংক্ষেপে, ড্রোন গবেষণার আমাদের বিশ্লেষণ এই জ্ঞান সংস্থার অদৃশ্য সংযোগগুলিকে প্রকাশ করে। এই পর্যালোচনা তাই প্রকাশনার মধ্যে সম্পর্ক উন্মোচন করতে সাহায্য করে এবং গবেষণা ক্ষেত্রের বৌদ্ধিক কাঠামো অন্বেষণ করে। এটি সাহিত্যের বিভিন্ন দিক যেমন লেখকের কীওয়ার্ড, অধিভুক্তি এবং দেশগুলির মধ্যে সংযোগগুলিকেও চিত্রিত করে।
প্রতিযোগিতামূলক আগ্রহের ঘোষণা
লেখকরা ঘোষণা করেন যে তাদের কাছে কোনও প্রতিদ্বন্দ্বী আর্থিক স্বার্থ বা ব্যক্তিগত সম্পর্ক নেই যা এই পত্রিকায় বর্ণিত কাজকে প্রভাবিত করার জন্য উপস্থিত হতে পারে।
পরিশিষ্ট 1
শিরোনাম-এবিএস-কী (((ড্রোন* বা "মানবহীন আকাশযান" বা uav* বা "মানবহীন বিমান ব্যবস্থা"বা uas বা "দূরবর্তীভাবে চালিত বিমান”) এবং (কৃষি বা কৃষি বা কৃষি বা কৃষক))) এবং (বাদ (পাউবার, 2022)) এবং (সীমা-টু (ভাষা, "ইংরেজি"))।
তথ্যসূত্র
Aasen, H., Burkart, A., Bolten, A., Bareth, G., 2015. গাছপালা পর্যবেক্ষণের জন্য লাইটওয়েট UAV স্ন্যাপশট ক্যামেরা সহ 3D হাইপারস্পেকট্রাল তথ্য তৈরি করা: থেকে
মানের নিশ্চয়তা ক্যামেরা ক্রমাঙ্কন. আইএসপিআরএস জে ফটোগ্রাম। রিমোট সেন্স। 108, 245-259। https://doi.org/10.1016/j.isprsjprs.2015.08.002।
আবদ-এলরহমান, এ., পার্লস্টাইন, এল., পার্সিভাল, এফ., 2005। মানহীন বায়বীয় গাড়ির চিত্র থেকে স্বয়ংক্রিয় পাখি সনাক্তকরণের জন্য প্যাটার্ন স্বীকৃতি অ্যালগরিদমের বিকাশ।
জরিপ. ভূমি তথ্য। বিজ্ঞান 65 (1), 37-45।
আবদুল্লাহি, এ., রেজেব, কে., রেজেব, এ., মোস্তফা, এমএম, জাইলানি, এস., 2021। কৃষিতে ওয়্যারলেস সেন্সর নেটওয়ার্ক: বিবলিওমেট্রিক বিশ্লেষণ থেকে অন্তর্দৃষ্টি। টেকসই 13 (21),
12011.
Aboutalebi, M., Torres-Rua, AF, Kustas, WP, Nieto, H., Coopmans, C., McKee, M., উচ্চ-রেজোলিউশনের অপটিক্যাল চিত্রে ছায়া সনাক্তকরণের জন্য বিভিন্ন পদ্ধতির মূল্যায়ন এবং গণনার উপর ছায়া প্রভাবের মূল্যায়ন এনডিভিআই, এবং বাষ্পীভবন। ইরিগ বিজ্ঞান 37 (3), 407-429। https://doi.org/10.1007/s00271-018-0613-9।
Adao, ˜ T., Hruˇska, J., Padua, ´ L., Bessa, J., Peres, E., Morais, R., Sousa, JJ, 2017. হাইপারস্পেকট্রাল ইমেজিং: UAV-ভিত্তিক সেন্সর, ডেটার উপর একটি পর্যালোচনা প্রক্রিয়াকরণ এবং
কৃষি ও বনায়নের জন্য আবেদন। রিমোট সেন্সিং 9 (11)। https://doi.org/ 10.3390/rs9111110।
Agüera Vega, F., Ramirez, FC, Saiz, MP, Rosúa, FO, 2015. একটি সূর্যমুখী ফসল নিরীক্ষণের জন্য একটি মানবহীন বায়বীয় যান ব্যবহার করে মাল্টি-টেম্পোরাল ইমেজিং। বায়োসিস্ট। ইঞ্জি.
132, 19–27. https://doi.org/10.1016/j.biosystemseng.2015.01.008.
Ajayi, OG, Salubi, AA, Angbas, AF, Odigure, MG, 2017. UAV থেকে নির্ভুল ডিজিটাল উচ্চতা মডেল তৈরি করা কম শতাংশে ওভারল্যাপিং চিত্রগুলি অর্জন করেছে। int.
জে. রিমোট সেন্স। 38 (8-10), 3113-3134। https://doi.org/10.1080/ 01431161.2017.1285085।
Ali, I., Greifeneder, F., Stamenkovic, J., Neumann, M., Notarnicola, C., 2015. রিমোট সেন্সিং ডেটা থেকে বায়োমাস এবং মাটির আর্দ্রতা পুনরুদ্ধারের জন্য মেশিন লার্নিং পদ্ধতির পর্যালোচনা। রিমোট সেন্সিং 7 (12), 16398–16421।
Alsamhi, SH, Afghah, F., Sahal, R., Hawbani, A., Al-qaness, MAA, Lee, B., Guizani, M., B5G নেটওয়ার্কে UAV ব্যবহার করে সবুজ ইন্টারনেট: অ্যাপ্লিকেশনগুলির একটি পর্যালোচনা
এবং কৌশল। বিজ্ঞাপন. এইক Netw. 117, 102505 https://doi.org/10.1016/j। adhoc.2021.102505.
আল-থানি, এন., আলবুয়াইন, এ., আলনাইমি, এফ., জোরবা, এন., 2020। ভেড়ার পশুসম্পদ পর্যবেক্ষণের জন্য ড্রোন। ইন: 20 তম IEEE ভূমধ্য ইলেক্ট্রোটেকনিক্যাল সম্মেলন। https://doi.
org/10.1109/MELECON48756.2020.9140588।
Ampatzidis, Y., Partel, V., 2019. মাল্টিস্পেকট্রাল ইমেজিং এবং কৃত্রিম বুদ্ধিমত্তা ব্যবহার করে সাইট্রাসে UAV-ভিত্তিক উচ্চ থ্রুপুট ফেনোটাইপিং। রিমোট সেন্সিং 11 (4), https://doi.org/10.3390/rs11040410।
Ampatzidis, Y., Partel, V., Costa, L., 2020. Agroview: কৃত্রিম বুদ্ধিমত্তা ব্যবহার করে নির্ভুল কৃষি অ্যাপ্লিকেশনের জন্য UAV-সংগৃহীত ডেটা প্রক্রিয়া, বিশ্লেষণ এবং কল্পনা করার জন্য ক্লাউড-ভিত্তিক অ্যাপ্লিকেশন। কম্পিউট ইলেক্ট্রন। কৃষি। 174, 105457 https://doi. org/10.1016/j.compag.2020.105457।
Ang, K.-L.-M., Seng, JKP, 2021। কৃষিতে হাইপারস্পেকট্রাল তথ্য সহ বিগ ডেটা এবং মেশিন লার্নিং। IEEE অ্যাক্সেস 9, 36699–36718। https://doi.org/10.1109/
ACCESS.2021.3051196.
Aquilani, C., Confessore, A., Bozzi, R., Sirtori, F., Pugliese, C., 2022. পর্যালোচনা: চারণভূমি-ভিত্তিক পশুসম্পদ ব্যবস্থায় নির্ভুল পশুসম্পদ চাষ প্রযুক্তি। প্রাণী 16 (1), https://doi.org/10.1016/j.animal.2021.100429।
Armenta-Medina, D., Ramirez-Delreal, TA, Villanueva-Vasquez, ´ D., Mejia-Aguirre, C., এর জন্য উন্নত তথ্য ও যোগাযোগ প্রযুক্তির প্রবণতা
কৃষি উৎপাদনশীলতা উন্নত করা: একটি বিবলিওমেট্রিক বিশ্লেষণ। কৃষিবিদ্যা 10 (12), প্রবন্ধ 12। https://doi.org/10.3390/agronomy10121989।
Armstrong, I., Pirrone-Brusse, M., Smith, A., Jadud, M., 2011. The flying gator: occam-π-এ এরিয়াল রোবোটিক্সের দিকে। কমুন প্রসেস আর্কিটেক্ট। 2011, 329-340। https://doi. org/10.3233/978-1-60750-774-1-329।
Arora, SD, Chakraborty, A., 2021. ভোক্তা অভিযোগকারী আচরণের বৌদ্ধিক কাঠামো (CCB) গবেষণা: একটি বাইবলিওমেট্রিক বিশ্লেষণ। জে. বিজনেস রেস. 122, 60-74।
Aslan, MF, Durdu, A., Sabanci, K., Ropelewska, E., Gültekin, SS, 2022।
খোলা মাঠ এবং গ্রিনহাউসে নির্ভুল কৃষির জন্য UAV-এর সাথে সাম্প্রতিক গবেষণার একটি ব্যাপক জরিপ। আবেদন বিজ্ঞান 12 (3), 1047। https://doi.org/10.3390/
app12031047.
Atkinson, JA, Jackson, RJ, Bentley, AR, Ober, E., & Wells, DM (2018)। ভবিষ্যতের জন্য ফিল্ড ফেনোটাইপিং। অনলাইনে বার্ষিক উদ্ভিদ পর্যালোচনায় (পৃ. 719-736)। জন
Wiley & Sons, Ltd. doi: 10.1002/9781119312994.apr0651.
অস্টিন, আর., 2010. মনুষ্যবিহীন এয়ারক্রাফ্ট সিস্টেম: ইউএভিএস ডিজাইন, ডেভেলপমেন্ট এবং ডিপ্লয়মেন্ট। ইন: মানববিহীন এয়ারক্রাফ্ট সিস্টেম: ইউএভিএস ডিজাইন, ডেভেলপমেন্ট এবং
স্থাপনা। জন উইলি অ্যান্ড সন্স। https://doi.org/10.1002/9780470664797।
আওয়াইস, এম., লি, ডব্লিউ., চিমা, এমজেএম, জামান, কিউ, শাহীন, এ., আসলাম, বি., ঝু, ডব্লিউ., আজমল, এম., ফাহিম, এম., হোসেন, এস., নাদিম, AA, Afzal, MM, Liu, C., 2022. UAV-ভিত্তিক রিমোট সেন্সিং ইন প্ল্যান্ট স্ট্রেস ডিজিটাল কৃষি অনুশীলনের জন্য উচ্চ-রেজোলিউশন থার্মাল সেন্সর ব্যবহার করে কল্পনা করুন: একটি মেটা-রিভিউ। int. J. পরিবেশ। বিজ্ঞান টেকনোল। https://doi.
org/10.1007/s13762-021-03801-5.
Bacco, M., Berton, A., Ferro, E., Gennaro, C., Gotta, A., Matteoli, S., Paonessa, F., Ruggeri, M., Virone, G., Zanella, A., 2018. স্মার্ট চাষ: সুযোগ, চ্যালেঞ্জ
এবং প্রযুক্তি সক্ষমকারী। 2018 IoT উল্লম্ব এবং। টপিকাল সামিট অন এগ্রিকালচার -টাস্কানি (আইওটি টাস্কানি) 1-6। https://doi.org/10.1109/IOTTUSCANY.2018.8373043।
Bah, MD, Hafiane, A., Canals, R., 2018. UAV ইমেজে লাইন ফসলে আগাছা সনাক্তকরণের জন্য তত্ত্বাবধানহীন ডেটা লেবেলিংয়ের সাথে গভীর শিক্ষা। রিমোট সেন্সিং 10 (11), 1690।
https://doi.org/10.3390/rs10111690.
বাল্ডি, এস., 1998. উদ্ধৃতি বরাদ্দে আদর্শ বনাম সামাজিক গঠনবাদী প্রক্রিয়া: একটি নেটওয়ার্ক-বিশ্লেষক মডেল। আমি সামাজিক। রেভ. 63 (6), 829-846। https://doi.
org/10.2307/2657504।
Baluja, J., Diago, MP, Balda, P., Zorer, R., Meggio, F., Morales, F., Tardaguila, J., 2012. তাপীয় এবং মাল্টিস্পেকট্রাল দ্বারা দ্রাক্ষাক্ষেত্রের জলের অবস্থার পরিবর্তনশীলতার মূল্যায়ন
মনুষ্যবিহীন এরিয়াল ভেহিকেল (UAV) ব্যবহার করে ছবি তোলা। ইরিগ বিজ্ঞান 30 (6), 511-522। https://doi.org/10.1007/s00271-012-0382-9।
Barabaschi, D., Tondelli, A., Desiderio, F., Volante, A., Vaccino, P., Val`e, G., Cattivelli, L., পরবর্তী প্রজন্মের প্রজনন। উদ্ভিদ বিজ্ঞান. 242, 3-13। https://doi.org/10.1016/j
plantsci.2015.07.010.
বারবেডো, জেজিএ, কোয়েনিগকান, এলভি, 2018। গবাদি পশুদের নিরীক্ষণের জন্য মনুষ্যবিহীন বায়বীয় ব্যবস্থা ব্যবহারের দৃষ্টিকোণ। আউটলুক এগ্রিক। 47 (3), 214-222। https://doi.org/10.1177/0030727018781876।
Bareth, G., Aasen, H., Bendig, J., Gnyp, ML, Bolten, A., Jung, A., Michels, R., Soukkamaki, ¨ J., 2015. কম ওজন এবং UAV-ভিত্তিক হাইপারস্পেকট্রাল ফুল ফ্রেম ক্যামেরা
ফসল পর্যবেক্ষণের জন্য: বহনযোগ্য স্পেকট্রোরেডিওমিটার পরিমাপের সাথে বর্ণালী তুলনা। Photogrammetrie, Fernerkundung, Geoinformation 2015 (1), 69–79.
https://doi.org/10.1127/pfg/2015/0256.
Barrientos, A., Colorado, J., del Cerro, J., Martinez, A., Rossi, C., Sanz, D., Valente, J., কৃষিতে এরিয়াল রিমোট সেন্সিং: এলাকা কভারেজের জন্য একটি ব্যবহারিক পদ্ধতি
এবং মিনি এরিয়াল রোবটের বহরগুলির জন্য পথ পরিকল্পনা। জে. ফিল্ড রব। 28 (5), 667-689। https://doi.org/10.1002/rob.20403।
বাসিরি, এ., মারিয়ানি, ভি., সিলানো, জি., আতিফ, এম., ইয়ানেলি, এল., গ্লিয়েলমো, এল., 2022। নির্ভুলতায় মাল্টি-রোটার ইউএভিগুলির জন্য পাথ-প্ল্যানিং অ্যালগরিদম প্রয়োগের উপর একটি সমীক্ষা
কৃষি জে. নেভিগ। 75 (2), 364–383।
বাসনেট, বি., ব্যাং, জে., 2018. জ্ঞান-নিবিড় কৃষির অত্যাধুনিক: ফলিত সেন্সিং সিস্টেম এবং ডেটা বিশ্লেষণের উপর একটি পর্যালোচনা। জে. সেন্স। 2018, 1-13।
Bendig, J., Bolten, A., Bareth, G., 2013. ফসলের বৃদ্ধির পরিবর্তনশীলতা নিরীক্ষণের জন্য বহু-স্থায়ী, খুব উচ্চ রেজোলিউশন ক্রপ পৃষ্ঠের মডেলগুলির জন্য UAV-ভিত্তিক ইমেজিং। Photogrammetrie, Fernerkundung, Geoinformation 2013 (6), 551–562. https://doi. org/10.1127/1432-8364/2013/0200।
Bendig, J., Bolten, A., Bennertz, S., Broscheit, J., Eichfuss, S., Bareth, G., 2014. UAV-ভিত্তিক RGB ইমেজিং থেকে প্রাপ্ত ক্রপ সারফেস মডেল (CSMs) ব্যবহার করে বার্লির জৈববস্তু অনুমান করা। রিমোট সেন্সিং 6 (11), 10395–10412।
Bendig, J., Yu, K., Aasen, H., Bolten, A., Bennertz, S., Broscheit, J., Gnyp, ML, Bareth, G., 2015. ফসলের পৃষ্ঠ থেকে UAV-ভিত্তিক উদ্ভিদের উচ্চতা একত্রিত করা মডেল,
দৃশ্যমান, এবং বার্লি মধ্যে জৈববস্তু নিরীক্ষণের জন্য ইনফ্রারেড গাছপালা সূচকের কাছাকাছি। int. জে অ্যাপল আর্থ Obs. জিওইনফ। 39, 79-87। https://doi.org/10.1016/j.jag.2015.02.012।
Berni, JA, Zarco-Tejada, PJ, Sepulcre-Canto, ´ G., Fereres, E., Villalobos, F., 2009a. উচ্চ রেজোলিউশন ব্যবহার করে জলপাই বাগানে ক্যানোপি কন্ডাক্টেন্স এবং CWSI ম্যাপিং
তাপীয় রিমোট সেন্সিং চিত্র। রিমোট সেন্স। পরিবেশ। 113 (11), 2380-2388। https://doi.org/10.1016/j.rse.2009.06.018।
Berni, JA, Zarco-Tejada, PJ, Suarez, ´ L., Fereres, E., 2009b. তাপীয় এবং ন্যারোব্যান্ড মাল্টিস্পেকট্রাল রিমোট সেন্সিং একটি মনুষ্যবিহীন বায়বীয় যান থেকে গাছপালা পর্যবেক্ষণের জন্য। IEEE ট্রান্স। জিওসি। রিমোট সেন্স। 47 (3), 722–738।
Bouzembrak, Y., Klüche, M., Gavai, A., Marvin, HJP, 2019. ইন্টারনেট অফ থিংস ইন ফুড সেফটি: লিটারেচার রিভিউ এবং একটি বিবলিওমেট্রিক বিশ্লেষণ। প্রবণতা খাদ্য বিজ্ঞান. টেকনোল। 94,54-64। https://doi.org/10.1016/j.tifs.2019.11.002।
Brewster, C., Roussaki, I., Kalatzis, N., Doolin, K., Ellis, K., 2017. IoT in Agriculture: Designing a Europe-wide large-scale pilot. আইইইই কমিউন। ম্যাগ. 55 (9), 26-33।
Buters, TM, Belton, D., Cross, AT, 2019. মিলিমিটার নির্ভুলতায় পৃথক চারা এবং চারা সম্প্রদায়ের মাল্টি-সেন্সর ইউএভি ট্র্যাকিং। ড্রোন 3 (4), 81।
https://doi.org/10.3390/drones3040081.
Candiago, S., Remondino, F., De Giglio, M., Dubbini, M., Gattelli, M., 2015. UAV ইমেজ থেকে নির্ভুল চাষের অ্যাপ্লিকেশনের জন্য মাল্টিস্পেকট্রাল ইমেজ এবং গাছপালা সূচকের মূল্যায়ন। রিমোট সেন্সিং 7 (4), 4026–4047। https://doi.org/10.3390/rs70404026।
Cao, Y., Li, GL, Luo, YK, Pan, Q., Zhang, SY, 2020. UAV থেকে প্রাপ্ত ওয়াইড-ডাইনামিক-রেঞ্জ ভেজিটেশন ইনডেক্স (WDRVI) ব্যবহার করে চিনির বীট বৃদ্ধির সূচকের পর্যবেক্ষণ
মাল্টিস্পেকট্রাল ছবি। কম্পিউট ইলেক্ট্রন। কৃষি। 171, 105331 https://doi.org/10.1016/j.compag.2020.105331।
ক্যাসিলাস, জে., অ্যাসেডো, এফ., 2007। পারিবারিক ব্যবসা সাহিত্যের বৌদ্ধিক কাঠামোর বিবর্তন: এফবিআর-এর একটি বিবলিওমেট্রিক অধ্যয়ন। পারিবারিক ব্যবসা রেভ. 20 (2), 141-162।
Cen, H., Wan, L., Zhu, J., Li, Y., Li, X., Zhu, Y., Weng, H., Wu, W., Yin, W., Xu, C., Bao, Y., Feng, L., Shou, J., He, Y., 2019. ধানের বায়োমাসের গতিশীল পর্যবেক্ষণ
দ্বৈত ইমেজ-ফ্রেম স্ন্যাপশট ক্যামেরা সহ একটি হালকা ওজনের UAV ব্যবহার করে বিভিন্ন নাইট্রোজেন চিকিত্সা। উদ্ভিদ পদ্ধতি 15 (1), 32. https://doi.org/10.1186/s13007-019-
0418-8।
চামুয়া, এ., সিং, আর., 2019। বেসামরিক ইউএভির মাধ্যমে ভারতীয় কৃষিতে স্থায়িত্ব সুরক্ষিত করা: একটি দায়িত্বশীল উদ্ভাবন দৃষ্টিকোণ। এসএন অ্যাপল। বিজ্ঞান 2 (1), 106. https://
doi.org/10.1007/s42452-019-1901-6.
চামুয়া, এ., সিং, আর., 2022। ভারতীয় শস্য বীমা অ্যাপ্লিকেশনের জন্য বেসামরিক মানবহীন বিমান যান (ইউএভি) উদ্ভাবনের দায়িত্বশীল শাসন। J. দায়িত্বশীল
টেকনোল। 9, 100025 https://doi.org/10.1016/j.jrt.2022.100025।
চেন, এ., অরলভ-লেভিন, ভি., মেরন, এম., 2019। নির্ভুল সেচ ব্যবস্থাপনায় ফসলের ছাউনির উচ্চ-রেজোলিউশন দৃশ্যমান-চ্যানেল এরিয়াল ইমেজিং প্রয়োগ করা। কৃষি। জল
মানগ। 216, 196-205। https://doi.org/10.1016/j.agwat.2019.02.017।
Daakir, M., Pierrot-Deseilligny, M., Bosser, P., Pichard, F., Thom, C., Rabot, Y., Martin, O., 2017. অন-বোর্ড ফটোগ্রামমেট্রি এবং একক ফ্রিকোয়েন্সি GPS পজিশনিং সহ লাইটওয়েট UAV মেট্রোলজি অ্যাপ্লিকেশনের জন্য। আইএসপিআরএস জে ফটোগ্রাম। রিমোট সেন্স। 127, 115-126। https://doi.org/10.1016/j.isprsjprs.2016.12.007।
Dawaliby, S., Aberkane, A., Bradai, A., 2020. স্বায়ত্তশাসিত ড্রোন অপারেশন পরিচালনার জন্য Blockchain-ভিত্তিক IoT প্ল্যাটফর্ম। ইন: ২য় ACM এর কার্যধারা
5G এবং তার বাইরের জন্য ড্রোন অ্যাসিস্টেড ওয়্যারলেস কমিউনিকেশনের উপর মোবিকম ওয়ার্কশপ, পৃষ্ঠা 31-36। https://doi.org/10.1145/3414045.3415939।
Day, RA, Gastel, B., 1998. কিভাবে একটি বৈজ্ঞানিক গবেষণাপত্র লিখবেন এবং প্রকাশ করবেন। ক্যামব্রিজ ইউনিভার্সিটি প্রেস. de Castro, AI, Pena, ˜ JM, Torres-sanchez, ´ J., Jim'enez-Brenes, FM, ValenciaGredilla, F., Recasens, J., Lopez-Granados, ´F., 2020. ম্যাপিং সাইনোডন ড্যাক্টাইলন ইনফেস্টিং একটি স্বয়ংক্রিয় সিদ্ধান্ত গাছ-ওবিআইএ পদ্ধতি এবং নির্ভুল ভিটিকালচারের জন্য ইউএভি চিত্র সহ ফসলগুলিকে কভার করুন। রিমোট সেন্সিং 12 (1), 56. https://doi.org/10.3390/rs12010056।
de Castro, AI, Torres-S´ anchez, J., Pena, ˜ JM, Jim´enez-Brenes, FM, Csillik, O., Lopez- ´Granados, F., 2018. একটি স্বয়ংক্রিয় র্যান্ডম ফরেস্ট-OBIA অ্যালগরিদম UAV চিত্র ব্যবহার করে শস্য সারির মধ্যে এবং মধ্যে প্রাথমিক আগাছা ম্যাপিং। রিমোট সেন্সিং 10 (2)। https://doi.org/10.3390/rs10020285।
Demir, N., Sonmez, ¨ NK, Akar, T., Ünal, S., 2018. UAV চিত্র থেকে প্রাপ্ত একটি DSM ব্যবহার করে গমের জিনোটাইপের উদ্ভিদের উচ্চতার স্বয়ংক্রিয় পরিমাপ। কার্যধারা 2 (7), 350। https://doi.org/10.3390/ecrs-2-05163।
Deng, J., Zhong, Z., Huang, H., Lan, Y., Han, Y., Zhang, Y., 2020। মনুষ্যবিহীন বায়বীয় যান ব্যবহার করে রিয়েল-টাইম উইড ম্যাপিংয়ের জন্য লাইটওয়েট সিমেন্টিক সেগমেন্টেশন নেটওয়ার্ক। আবেদন বিজ্ঞান 10 (20), 7132। https://doi.org/10.3390/app10207132।
Deng, L., Mao, Z., Li, X., Hu, Z., Duan, F., Yan, Y., 2018. নির্ভুল কৃষির জন্য UAV-ভিত্তিক মাল্টিস্পেকট্রাল রিমোট সেন্সিং: বিভিন্ন ক্যামেরার মধ্যে তুলনা৷ আইএসপিআরএস জে ফটোগ্রাম। রিমোট সেন্স। 146, 124-136।
Diaz-Gonzalez, FA, Vuelvas, J., Correa, CA, Vallejo, VE, Patino, D., 2022. মাটির সূচক অনুমান করার জন্য প্রয়োগ করা মেশিন লার্নিং এবং রিমোট সেন্সিং কৌশল - পর্যালোচনা। ইকোল। ইন্ড. 135, 108517 https://doi.org/10.1016/j.ecolind.2021.108517।
Díaz-Varela, RA, De la Rosa, R., Leon, ´ L., Zarco-Tejada, PJ, 2015. 3D ফটো ব্যবহার করে জলপাই গাছের মুকুট পরামিতিগুলি মূল্যায়ন করার জন্য উচ্চ-রেজোলিউশনের বায়ুবাহিত UAV চিত্র
পুনর্গঠন: প্রজনন পরীক্ষায় প্রয়োগ। রিমোট সেন্সিং 7 (4), 4213–4232। https://doi.org/10.3390/rs70404213।
দীক্ষিত, এ., জাখর, এসকে, 2021। বিমানবন্দরের ক্ষমতা ব্যবস্থাপনা: একটি পর্যালোচনা এবং বিবলিওমেট্রিক বিশ্লেষণ। জে. এয়ার ট্রান্সপ মানগ। 91, 102010।
ডং, টি., শাং, জে., লিউ, জে., কিয়ান, বি., জিং, কিউ., মা, বি., হাফম্যান, টি., গেং, এক্স., সো, এ., শি, ওয়াই, Canisius, F., Jiao, X., Kovacs, JM, Walters, D., Cable, J., Wilson, J., 2019।
কানাডার অন্টারিওতে শস্যের বৃদ্ধি এবং ফলনের ক্ষেত্রের মধ্যে পরিবর্তনশীলতা সনাক্ত করতে RapidEye চিত্র ব্যবহার করা। যথার্থ কৃষি। 20 (6), 1231-1250। https://doi.org/10.1007/
s11119-019-09646-w.
দত্ত, পিকে, মিত্র, এস., 2021। কোভিড-১৯ পরবর্তী সময়ে খাদ্য সরবরাহের চেইন বোঝার জন্য কৃষি ড্রোন এবং আইওটি-এর প্রয়োগ। ইন: চৌধুরী, এ., বিশ্বাস, এ., প্রতীক, এম.,
চক্রবর্তী, এ. (সম্পাদনা), কৃষি তথ্যবিজ্ঞান: অটোমেশন ইউজিং দ্য আইওটি এবং মেশিন লার্নিং। উইলি, পৃষ্ঠা 67-87। van Eck, N., Waltman, L., 2009. সফটওয়্যার জরিপ: VOSviewer, bibliometric ম্যাপিংয়ের জন্য একটি কম্পিউটার প্রোগ্রাম। সায়েন্টমেট্রিক্স 84 (2), 523–538। https://doi.org/10.1007/s11192-009-0146-3।
Elijah, O., Rahman, TA, Orikumhi, I., Leow, CY, Hindia, MN, 2018. একটি সংক্ষিপ্ত বিবরণ ইন্টারনেট অফ থিংস (IoT) এবং কৃষিতে ডেটা বিশ্লেষণ: সুবিধা এবং চ্যালেঞ্জ।
IEEE ইন্টারনেট থিংস J. 5 (5), 3758–3773.
Enciso, J., Avila, CA, Jung, J., Elsayed-Farag, S., Chang, A., Yeom, J., Landivar, J., Maeda, M., Chavez, JC, 2019. কৃষিবিজ্ঞানের বৈধতা UAV এবং ক্ষেত্র
টমেটো জাতের জন্য পরিমাপ। কম্পিউট ইলেক্ট্রন। কৃষি। 158, 278-283। https:// doi.org/10.1016/j.compag.2019.02.011।
Espinoza, CZ, Khot, LR, Sankaran, S., Jacoby, PW, 2017. উচ্চ রেজোলিউশন মাল্টিস্পেকট্রাল এবং থার্মাল রিমোট সেন্সিং-ভিত্তিক জলের চাপের মূল্যায়ন
ভূপৃষ্ঠের সেচকৃত আঙ্গুরের লতা। রিমোট সেন্সিং 9 (9), 961। https://doi.org/ 10.3390/rs9090961।
Ewing, J., Oommen, T., Jayakumar, P., Alger, R., 2020. মাটি গ্রেডেশনের জন্য হাইপারস্পেকট্রাল রিমোট সেন্সিং ব্যবহার করা। রিমোট সেন্সিং 12 (20), 3312. ttps://doi.org/10.3390/
rs12203312।
Fawcett, D., Panigada, C., Tagliabue, G., Boschetti, M., Celesti, M., Evdokimov, A., Biriukova, K., Colombo, R., Miglietta, F., Rascher, U., অ্যান্ডারসন, কে., 2020। ড্রোন-ভিত্তিক মাল্টিস্পেকট্রাল পৃষ্ঠের প্রতিফলন এবং কর্মক্ষম পরিস্থিতিতে গাছপালা সূচকের বহুমাত্রিক মূল্যায়ন। রিমোট সেন্সিং 12 (3), 514।
Feng, X., Yan, F., Liu, X., 2019. সঠিক কৃষির জন্য ইন্টারনেট অফ থিংসে বেতার যোগাযোগ প্রযুক্তির অধ্যয়ন৷ বেতার Pers. কমুন 108 (3),
1785-1802।
Ferreira, MP, Pinto, CF, Serra, FR, 2014. আন্তর্জাতিক ব্যবসায়িক গবেষণায় লেনদেনের খরচ তত্ত্ব: তিন দশক ধরে একটি বাইবলিওমেট্রিক অধ্যয়ন। সায়েন্টমেট্রিক্স 98 (3), 1899-1922। https://doi.org/10.1007/s11192-013-1172-8।
ফিশার, পি., আবুজার, এম., রব, এম., বেস্ট, এফ., চন্দ্র, এস., 2009. দক্ষিণ-পূর্ব অস্ট্রেলিয়ায় নির্ভুল কৃষিতে অগ্রগতি৷ I. অনুকরণ করার জন্য একটি রিগ্রেশন পদ্ধতি
কৃষকদের ঐতিহাসিক প্যাডক ফলন এবং স্বাভাবিক পার্থক্য গাছপালা সূচক ব্যবহার করে খাদ্যশস্যের ফলনে স্থানিক পরিবর্তন। শস্য চারণভূমি বিজ্ঞান. 60 (9), 844-858।
Floreano, D., Wood, RJ, 2015. বিজ্ঞান, প্রযুক্তি এবং ছোট স্বায়ত্তশাসিত ড্রোনের ভবিষ্যত। প্রকৃতি 521 (7553), 460–466। https://doi.org/10.1038/nature14542।
Friha, O., Ferrag, MA, Shu, L., Maglaras, LA, Wang, X., 2021. স্মার্ট এগ্রিকালচারের ভবিষ্যতের জন্য ইন্টারনেট অব থিংস: উদীয়মান প্রযুক্তির একটি ব্যাপক সমীক্ষা। IEEE CAA J. Autom. সিনিকা 8 (4), 718-752।
Fuentes-Pacheco, J., Torres-Olivares, J., Roman-Rangel, E., Cervantes, S., JuarezLopez, P., Hermosillo-Valadez, J., Rendon-Mancha, ´ JM, 2019. ডুমুর উদ্ভিদ বিভাজন একটি গভীর কনভোল্যুশনাল এনকোডার-ডিকোডার নেটওয়ার্ক ব্যবহার করে এরিয়াল ইমেজ থেকে। রিমোট সেন্সিং 11 (10), 1157। https://doi.org/10.3390/rs11101157।
Gago, J., Douthe, C., Coopman, RE, Gallego, PP, Ribas-Carbo, M., Flexas, J., Escalona, J., Medrano, H., 2015. পানির চাপের মূল্যায়ন করার জন্য UAVs চ্যালেঞ্জ
টেকসই কৃষি. কৃষি। ওয়াটার ম্যানাগ। 153, 9-19। https://doi.org/10.1016/j agwat.2015.01.020.
গার্সিয়া-তেজেরো, IF, রুবিও, AE, ভিনুয়েলা, ˜ I., Hern´ Andez, A., Guti´errez-Gordillo, S., Rodríguez-Pleguezuelo, CR, Dur´ an-Zuazo, VH, 2018. তাপীয় চিত্র উদ্ভিদ এ
ঘাটতি সেচ কৌশলের অধীনে বাদাম গাছে (cv. Guara) ফসল-জলের অবস্থা মূল্যায়নের স্তর। কৃষি। ওয়াটার ম্যানাগ। 208, 176-186। https://doi.org/10.1016/j
agwat.2018.06.002.
Garzonio, R., Di Mauro, B., Colombo, R., Cogliati, S., 2017. একটি ছোট হাইপারস্পেকট্রাল UAS ব্যবহার করে সারফেস রিফ্ল্যাল্যান্স এবং সানডিউসড ফ্লুরোসেন্স স্পেকট্রোস্কোপি পরিমাপ। রিমোট সেন্সিং 9 (5), 472। https://doi.org/10.3390/rs9050472। Gaˇsparovi´c, M., Zrinjski, M., Barkovi´c, Đ., Radoˇcaj, D., 2020. এর জন্য একটি স্বয়ংক্রিয় পদ্ধতি
UAV চিত্রের উপর ভিত্তি করে ওট ক্ষেত্রের আগাছা ম্যাপিং। কম্পিউট ইলেক্ট্রন। কৃষি।
গেবার্স, আর., অ্যাডামচুক, VI, 2010। যথার্থ কৃষি এবং খাদ্য নিরাপত্তা। বিজ্ঞান 327 (5967), 828–831। https://doi.org/10.1126/science.1183899।
Geipel, J., Link, J., Claupein, W., 2014. ভুট্টা ফলনের সম্মিলিত বর্ণালী এবং স্থানিক মডেলিং একটি মানববিহীন বিমান ব্যবস্থার মাধ্যমে অর্জিত বায়বীয় চিত্র এবং ফসলের পৃষ্ঠের মডেলের উপর ভিত্তি করে। রিমোট সেন্সিং 6 (11), 10335–10355। https://doi.org/10.3390/rs61110335।
Geng, D., Feng, Y., Zhu, Q., 2020. ব্যবহারকারীদের জন্য টেকসই নকশা: একটি সাহিত্য পর্যালোচনা এবং বাইবলিওমেট্রিক বিশ্লেষণ। পরিবেশ। বিজ্ঞান দূষণ। Res. 27 (24), 29824–29836। https://doi. org/10.1007/s11356-020-09283-1।
Gevaert, CM, Suomalainen, J., Tang, J., Kooistra, L., 2015. মাল্টিস্পেকট্রাল স্যাটেলাইট এবং হাইপারস্পেকট্রাল একত্রিত করে বর্ণালী টেম্পোরাল রেসপন্স সারফেস তৈরি করা
নির্ভুল কৃষি অ্যাপ্লিকেশনের জন্য UAV চিত্র। IEEE J. Sel. শীর্ষ. আবেদন আর্থ Obs. রিমোট সেন্স। 8 (6), 3140–3146। ttps://doi.org/10.1109/JSTARS.2015.2406339।
Gill, SS, Chana, I., Buyya, R., 2017. একটি ক্লাউড এবং বড় ডেটা পরিষেবা হিসাবে IoT ভিত্তিক কৃষি: ডিজিটাল ভারতের সূচনা৷ J. Org. এবং শেষ ব্যবহারকারী কম্পিউট। (JOEUC) 29 (4),
1-23।
Gmür, M., 2006. সহ-উদ্ধৃতি বিশ্লেষণ এবং অদৃশ্য কলেজগুলির জন্য অনুসন্ধান: একটি পদ্ধতিগত মূল্যায়ন। সায়েন্টমেট্রিক্স 57 (1), 27-57। https://doi.org/10.1023/
a:1023619503005.
Gnadinger, ¨ F., Schmidhalter, U., 2017. মনুষ্যবিহীন এরিয়াল ভেহিকল (UAVs) দ্বারা ভুট্টা গাছের ডিজিটাল গণনা। রিমোট সেন্সিং 9 (6)। https://doi.org/10.3390/rs9060544।
Gokto ¨ ǧan, AH, Sukkarieh, S., Bryson, M., Randle, J., Lupton, T., Hung, C., 2010. জলজ আগাছা নজরদারির জন্য একটি রোটারি-উইং মানবহীন বিমান যান এবং
ব্যবস্থাপনা জে. ইন্টেল। রোবোটিক সিস্টেম: থিওর। আবেদন 57 (1-4), 467-484। https://doi. org/10.1007/s10846-009-9371-5।
Gomez-Cand ´ on, ´ D., De Castro, AI, Lopez-Granados, ´ F., 2014. গমে নির্ভুল কৃষিকাজের জন্য মনুষ্যবিহীন বায়বীয় যান (UAV) চিত্র থেকে মোজাইকের যথার্থতা মূল্যায়ন করা। যথার্থ। কৃষি। 15 (1), 44-56। https://doi.org/10.1007/s11119-013-9335-4।
Gomez-Cand ´ on, ´D., Virlet, N., Labb´e, S., Jolivot, A., Regnard, J.-L., 2016. UAV- সংবেদিত চিত্র দ্বারা গাছের স্কেলে জলের চাপের ফিল্ড ফেনোটাইপিং : জন্য নতুন অন্তর্দৃষ্টি
তাপীয় অধিগ্রহণ এবং ক্রমাঙ্কন। যথার্থ। কৃষি। 17 (6), 786-800। https://doi.org/10.1007/s11119-016-9449-6।
Gonzalez-Dugo, V., Zarco-Tejada, PJ, Fereres, E., 2014. সাইট্রাস বাগানে পানির ঘাটতির সূচক হিসাবে ফসলের জলের চাপ সূচক ব্যবহার করার প্রযোজ্যতা এবং সীমাবদ্ধতা। কৃষি। জন্য Meteorol. 198-199, 94-104। https://doi.org/10.1016/j agrformet.2014.08.003.
Gonzalez-Dugo, V., Zarco-Tejada, P., Nicolas, ´ E., Nortes, PA, Alarcon, ´ JJ, Intrigliolo, DS, Fereres, E., 2013. উচ্চ রেজোলিউশন UAV তাপীয় চিত্র ব্যবহার করে
একটি বাণিজ্যিক বাগানের মধ্যে পাঁচটি ফলের গাছের প্রজাতির জলের অবস্থার পরিবর্তনশীলতা মূল্যায়ন করুন। যথার্থ। কৃষি। 14 (6), 660-678। https://doi.org/10.1007/s11119-013-9322-9।
গয়াল, কে., কুমার, এস., 2021। আর্থিক সাক্ষরতা: একটি পদ্ধতিগত পর্যালোচনা এবং গ্রন্থিমিতিক বিশ্লেষণ। int. জে. কনজিউমার স্টাডিজ 45 (1), 80-105। https://doi.org/10.1111/
ijcs.12605.
Grenzdorffer, ¨ GJ, Engel, A., Teichert, B., 2008. বনায়ন এবং কৃষিতে কম খরচের uavs এর ফটোগ্রামমেট্রিক সম্ভাবনা। ফটোগ্রামমেট্রি, রিমোট সেন্সিং এবং স্থানিক তথ্য বিজ্ঞানের আন্তর্জাতিক আর্কাইভস - আইএসপিআরএস আর্কাইভস 37, 1207-1213। https://www.scopus.com/inward/record.uri?eid=2-s2.0-85039543258&partnerI D=40&md5=b4b2d639257e8ddb5a373d15959c4e1e।
গুয়ান, এস., ফুকামি, কে., মাতসুনাকা, এইচ., ওকামি, এম., তানাকা, আর., নাকানো, এইচ., সাকাই, টি., নাকানো, কে., ওহদান, এইচ., তাকাহাশি, কে., 2019. উচ্চ-রেজোলিউশনের পারস্পরিক সম্পর্ক মূল্যায়ন
ছোট UAV ব্যবহার করে সার প্রয়োগের স্তর এবং ধান ও গম ফসলের ফলন সহ NDVI। রিমোট সেন্সিং 11 (2), 112।
Gundolf, K., Filser, M., 2013. ব্যবস্থাপনা গবেষণা এবং ধর্ম: একটি উদ্ধৃতি বিশ্লেষণ। জে. বাস। নীতিশাস্ত্র 112 (1), 177-185।
Guo, Q., Zhu, Y., Tang, Y., Hou, C., He, Y., Zhuang, J., Zheng, Y., Luo, S., 2020. CFD সিমুলেশন এবং স্থানিকের পরীক্ষামূলক যাচাইকরণ এবং সাময়িক বন্টন
হোভারে একটি কোয়াড-রটার কৃষি UAV এর ডাউনওয়াশ বায়ুপ্রবাহ। কম্পিউট ইলেক্ট্রন। কৃষি। 172, 105343 https://doi.org/10.1016/j.compag.2020.105343।
Haghighattalab, A., Gonz' Alez P'erez, L., Mondal, S., Singh, D., Schinstock, D., Rutkoski, J., Ortiz-Monasterio, I., Singh, RP, Goodin, D. , পোল্যান্ড, জে., 2016।
বড় গম প্রজনন নার্সারিগুলির উচ্চ থ্রুপুট ফেনোটাইপিংয়ের জন্য মানবহীন বায়বীয় সিস্টেমের প্রয়োগ। উদ্ভিদ পদ্ধতি 12 (1)। https://doi.org/10.1186/s13007-
016-0134-6।
Hakala, T., Honkavaara, E., Saari, H., Makynen, ¨ J., Kaivosoja, J., Pesonen, L., & Pol ¨ onen, ¨I., 2013. বিভিন্ন আলোকিত অবস্থার অধীনে UAVs থেকে স্পেকট্রাল ইমেজিং . GG Bill R. (Ed.), International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences—ISPRS Archives (Vol. 40, Issue 1W2, pp. 189–194)। ইন্টারন্যাশনাল সোসাইটি ফর ফটোগ্রামমেট্রি এবং রিমোট সেন্সিং। https://www.scopus.com/inward/record.uri?eid=2-s2.0-848875632।
হ্যামিল্টন, এসএম, মরিস, আরএইচ, কারভালহো, আরসি, রডার, এন., বারলো, পি., মিলস, কে., ওয়াং, এল. মানবহীন বায়বীয় থেকে দ্বীপের গাছপালা ম্যাপিংয়ের জন্য মূল্যায়ন কৌশল
যানবাহন (UAV) ছবি: পিক্সেল শ্রেণীবিভাগ, ভিজ্যুয়াল ব্যাখ্যা এবং মেশিন লার্নিং পদ্ধতি। int. জে অ্যাপল আর্থ Obs. জিওইনফ। 89, 102085 https://doi.org/
10.1016/j.jag.2020.102085.
হক, এ., ইসলাম, এন., সম্রাট, এনএইচ, দে, এস., রে, বি., 2021৷ বাংলাদেশে দায়িত্বশীল নেতৃত্বের মাধ্যমে স্মার্ট চাষ: সম্ভাবনা, সুযোগ এবং তার বাইরে৷
টেকসই 13 (8), 4511।
Hardin, PJ, Hardin, TJ, 2010. পরিবেশগত গবেষণায় ছোট আকারের দূরবর্তীভাবে চালিত যানবাহন। ভূগোল কম্পাস 4 (9), 1297-1311। ttps://doi.org/10.1111/j.1749-
8198.2010.00381.x।
হার্ডিন, পিজে, জেনসেন, আরআর, 2011। পরিবেশগত রিমোট সেন্সিংয়ে ছোট আকারের মানববিহীন বায়বীয় যান: চ্যালেঞ্জ এবং সুযোগ। GISci. রিমোট সেন্স। 48 (1), 99-111। https://doi.org/10.2747/1548-1603.48.1.99
He, Y., Nie, P., Zhang, Q., Liu, F., 2021. এগ্রিকালচারাল ইন্টারনেট অফ থিংস: প্রযুক্তি এবং অ্যাপ্লিকেশন, (1ম সংস্করণ 2021 সংস্করণ)। স্প্রিংগার।
Herwitz, SR, Johnson, LF, Dunagan, SE, Higgins, RG, Sullivan, DV, Zheng, J., Lobitz, BM, Leung, JG, Gallmeyer, BA, Aoyagi, M., Slye, RE, Brass, JA, 2004।
একটি মানবহীন বায়বীয় যান থেকে ইমেজিং: কৃষি নজরদারি এবং সিদ্ধান্ত সমর্থন। কম্পিউট ইলেক্ট্রন। কৃষি। 44 (1), 49-61। https://doi.org/10.1016/j
compag.2004.02.006.
Holman, FH, Riche, AB, Michalski, A., Castle, M., Wooster, MJ, Hawkesford, MJ, UAV ভিত্তিক রিমোট সেন্সিং ব্যবহার করে ফিল্ড প্লট ট্রায়ালে গম গাছের উচ্চতা এবং বৃদ্ধির হারের উচ্চ থ্রুপুট ফিল্ড ফিনোটাইপিং। রিমোট সেন্সিং 8 (12)। https://doi. org/10.3390/rs8121031।
Honkavaara, E., Saari, H., Kaivosoja, J., Pol ¨ oneen, ¨ I., Hakala, T., Litkey, P., M¨akynen, J., Pesonen, L., 2013. প্রক্রিয়াকরণ এবং মূল্যায়ন স্পেকট্রোমেট্রিক, স্টেরিওস্কোপিক ইমেজ সংগৃহীত একটি হালকা ওজনের UAV বর্ণালী ক্যামেরা ব্যবহার করে নির্ভুল কৃষির জন্য। রিমোট সেন্সিং 5 (10), 5006–5039। https://doi.org/10.3390/rs5105006।
হোসেইন মোটলাঘ, এন., তালেব, টি., আরুক, ও., 2016। নিম্ন-উচ্চতা মানববিহীন আকাশযান ভিত্তিক ইন্টারনেট অফ থিংস পরিষেবা: ব্যাপক সমীক্ষা এবং ভবিষ্যত দৃষ্টিভঙ্গি। IEEE ইন্টারনেট থিংস J. 3 (6), 899–922। https://doi.org/10.1109/JIOT.2016.2612119।
Hrabar, S., Sukhatme, GS, Corke, P., Usher, K., রবার্টস, J., 2005. সম্মিলিত অপটিক-প্রবাহ এবং একটি UAV-এর জন্য শহুরে ক্যানিয়নের স্টেরিও-ভিত্তিক নেভিগেশন। ইন: 2005 IEEE/RSJ
ইন্টেলিজেন্ট রোবট এবং সিস্টেমের উপর আন্তর্জাতিক সম্মেলন, পৃষ্ঠা 3309–3316। https://doi.org/10.1109/IROS.2005.1544998।
Hsu, T.-C., Yang, H., Chung, Y.-C., Hsu, C.-H., 2020। ক্লাউড ফগ কম্পিউটিংয়ের জন্য একটি সৃজনশীল IoT কৃষি প্ল্যাটফর্ম। টিকিয়ে রাখা। কম্পিউট ইনফ. সিস্ট 28, 100285।
Huang, H., Deng, J., Lan, Y., Yang, A., Deng, X., Zhang, L., Gonzalez-Andujar, JL, 2018. মানবহীন বায়বীয় যানের আগাছা ম্যাপিংয়ের জন্য একটি সম্পূর্ণ রূপান্তরমূলক নেটওয়ার্ক ( UAV) চিত্র। PLOS ONE 13 (4), e0196302।
Huang, H., Lan, Y., Yang, A., Zhang, Y., Wen, S., Deng, J., 2020. ডিপ লার্নিং বনাম অবজেক্ট-ভিত্তিক ইমেজ অ্যানালাইসিস (OBIA) UAV ইমেজের আগাছা ম্যাপিং। int. জে.
রিমোট সেন্স। 41 (9), 3446–3479। https://doi.org/10.1080/01431161.2019.1706112।
Huang, H., Yang, A., Tang, Y., Zhuang, J., Hou, C., Tan, Z., Dananjayan, S., He, Y., Guo, Q., Luo, S., 2021. ফসল পর্যবেক্ষণে UAV চিত্রের জন্য গভীর রঙের ক্রমাঙ্কন
স্থানীয় থেকে বিশ্বব্যাপী মনোযোগ সহ শব্দার্থিক শৈলী স্থানান্তর ব্যবহার করে। int. জে অ্যাপল আর্থ Obs. জিওইনফ। 104, 102590 https://doi.org/10.1016/j.jag.2021.102590।
Huang, YB, Thomson, SJ, Hoffmann, WC, Lan, YB, Fritz, BK, 2013. কৃষি উৎপাদনের জন্য মনুষ্যবিহীন আকাশযান প্রযুক্তির উন্নয়ন এবং সম্ভাবনা
ব্যবস্থাপনা int. জে এগ্রিক। বায়োল ইঞ্জি. 6 (3), 1-10। https://doi.org/10.3965/j ijabe.20130603.001.
Huang, Y., Hoffmann, WC, Lan, Y., Wu, W., Fritz, BK, 2009. একটি মানবহীন বায়বীয় গাড়ির প্ল্যাটফর্মের জন্য একটি স্প্রে সিস্টেমের উন্নয়ন। আবেদন ইঞ্জি. কৃষি। 25 (6), 803-809।
Hunt Jr., ER, Dean Hively, W., Fujikawa, SJ, Linden, DS, Daughtry, CST, McCarty, GW, 2010. থেকে NIR-সবুজ-নীল ডিজিটাল ফটোগ্রাফের অধিগ্রহণ
ফসল পর্যবেক্ষণের জন্য মনুষ্যবিহীন বিমান। রিমোট সেন্সিং 2 (1), 290-305। https://doi. org/10.3390/rs2010290। Inoue, Y., 2020. স্যাটেলাইট- এবং ড্রোন-ভিত্তিক রিমোট সেন্সিং-এর জন্য শস্য ও মাটির স্মার্ট চাষ-একটি পর্যালোচনা। মৃত্তিকা বিজ্ঞান. উদ্ভিদ পুষ্টি। 66 (6), 798-810। https://doi.org/10.1080/00380768.2020.1738899।
Islam, N., Rashid, MM, Pasandideh, F., Ray, B., Moore, S., Kadel, R., 2021. ইন্টারনেট অফ থিংস (IoT) এর জন্য অ্যাপ্লিকেশন এবং যোগাযোগ প্রযুক্তির পর্যালোচনা এবং
মনুষ্যবিহীন এরিয়াল ভেহিকল (UAV) ভিত্তিক টেকসই স্মার্ট ফার্মিং। স্থায়িত্ব 13 (4), 1821। https://doi.org/10.3390/su13041821।
Jaud, M., Passot, S., Le Bivic, R., Delacourt, C., Grandjean, P., Le Dantec, N., 2016. দ্বারা গণনা করা উচ্চ রেজোলিউশন ডিজিটাল পৃষ্ঠের মডেলগুলির যথার্থতা মূল্যায়ন
PhotoScan® এবং MicMac® উপ-অনুকূল জরিপ অবস্থায়। রিমোট সেন্সিং 8 (6), https://doi.org/10.3390/rs8060465।
জিমেনেজ-ব্রেনেস, এফএম, লোপেজ-গ্রানাডোস, এফ., কাস্ত্রো, এআই, টোরেস-সা' আনচেজ, জে., সেরানো, এন., পেনা, ˜ জেএম, 2017। জলপাই গাছের স্থাপত্য এবং বার্ষিকের উপর ছাঁটাইয়ের প্রভাবের পরিমাণ নির্ধারণ করা UAV-ভিত্তিক 3D মডেলিং ব্যবহার করে ক্যানোপি বৃদ্ধি। উদ্ভিদ পদ্ধতি 13 (1)। https://doi.org/10.1186/s13007-017-0205-3।
Jin, X., Liu, S., Baret, F., Hemerl´e, M., Comar, A., 2017. খুব কম উচ্চতার UAV চিত্র থেকে উদ্ভূত গম ফসলের উদ্ভিদ ঘনত্বের অনুমান। রিমোট সেন্স।
পরিবেশ। 198, 105-114। https://doi.org/10.1016/j.rse.2017.06.007।
Jinbo, C., Xiangliang, C., Han-Chi, F., Lam, A., 2019. ক্লাউড কম্পিউটিং দ্বারা সমর্থিত কৃষি পণ্য পর্যবেক্ষণ সিস্টেম। ক্লাস্টার কম্পিউট। 22 (4), 8929–8938।
Ju, C., & Son, HI 2018a. কৃষিতে রিমোট সেন্সিংয়ের জন্য একাধিক UAV সিস্টেমের কর্মক্ষমতা মূল্যায়ন। IEEE ইন্টারন্যাশনাল কনফারেন্স অন রোবোটিক্স অ্যান্ড অটোমেশন (ICRA), ব্রিসবেন, অস্ট্রেলিয়া, 21-26-এ রোবোটিক ভিশন অ্যান্ড অ্যাকশন ইন এগ্রিকালচারের কর্মশালার কার্যক্রম।
Ju, C., Son, HI, 2018b. কৃষি অ্যাপ্লিকেশনের জন্য একাধিক UAV সিস্টেম: নিয়ন্ত্রণ, বাস্তবায়ন এবং মূল্যায়ন। ইলেকট্রনিক্স 7 (9), 162। https://doi.org/10.3390/
ইলেকট্রনিক্স7090162।
Jung, J., Maeda, M., Chang, A., Bhandari, M., Ashapure, A., Landivar-Bowles, J., 2021. উন্নত করার হাতিয়ার হিসেবে রিমোট সেন্সিং এবং কৃত্রিম বুদ্ধিমত্তার সম্ভাবনা
কৃষি উৎপাদন ব্যবস্থার স্থিতিস্থাপকতা। কার মতামত বায়োটেকনোল। 70, 15-22। https://doi.org/10.1016/j.copbio.2020.09.003।
কালিশুক, এম., পেরেট, এমএল, ফ্রিম্যান, জেএইচ, রাজ, ডি., দা সিলভা, এস., ইউব্যাঙ্কস, এস., উইগিন্স, ডিজে, লোলার, এম., মারোইস, জেজে, মেলিঙ্গার, এইচসি, দাস, জে। , 2019. একটি উন্নত ক্রপ স্কাউটিং কৌশল যা তরমুজে আঠালো স্টেম ব্লাইটের জন্য প্রচলিত স্কাউটিং অনুশীলনে মনুষ্যবিহীন বায়বীয় যান-সহায়তা মাল্টিস্পেকট্রাল ক্রপ ইমেজিংকে অন্তর্ভুক্ত করে। উদ্ভিদ Dis. 103 (7), 1642-1650।
কাপুর, কেকে, তামিলমনি, কে., রানা, এনপি, পাতিল, পি., দ্বিবেদী, ওয়াইকে, নেরুর, এস., 2018। সোশ্যাল মিডিয়া গবেষণায় অগ্রগতি: অতীত, বর্তমান এবং ভবিষ্যত। অবহিত করুন। সিস্ট সামনে। 20
(3), 531-558
Kerkech, M., Hafiane, A., Canals, R., 2020. VddNet: মাল্টিস্পেকট্রাল চিত্র এবং গভীরতার মানচিত্রের উপর ভিত্তি করে লতা রোগ সনাক্তকরণ নেটওয়ার্ক। রিমোট সেন্সিং 12 (20), 3305. https://doi. org/10.3390/rs12203305।
Khaliq, A., Comba, L., Biglia, A., Ricauda Aimonino, D., Chiaberge, M., Gay, P., 2019. দ্রাক্ষাক্ষেত্রের জন্য উপগ্রহ এবং UAV-ভিত্তিক মাল্টিস্পেকট্রাল চিত্রের তুলনা
পরিবর্তনশীলতা মূল্যায়ন। রিমোট সেন্সিং 11 (4)। https://doi.org/10.3390/rs11040436।
Khan, PW, Byun, Y.-C., Park, N., 2020. IoT-ব্লকচেন উন্নত গভীর শিক্ষা ব্যবহার করে খাদ্য শিল্প 4.0 এর জন্য অপ্টিমাইজড প্রোভেন্যান্স সিস্টেম সক্ষম করেছে। সেন্সর 20 (10), 2990।
Khan, RU, Khan, K., Albattah, W., Qamar, AM, Ullah, F., 2021. গাছের রোগের চিত্র-ভিত্তিক সনাক্তকরণ: ক্লাসিক্যাল মেশিন লার্নিং থেকে গভীর শিক্ষার যাত্রা। ওয়্যারলেস কমিউন। মোবাইল কম্পিউট। 2021, 1-13।
খান, এস., তুফায়েল, এম., খান, এমটি, খান, জেডএ, ইকবাল, জে., আলম, এম, লে, কেএনকিউ, 2021। ইউএভি ভিত্তিক ফসল/আগাছা শ্রেণীবিভাগের জন্য একটি অভিনব আধা-তত্ত্বাবধান করা কাঠামো। PLOS ONE 16 (5), e0251008।
Khanal, S., Fulton, J., Shearer, S., 2017. যথার্থ কৃষিতে তাপীয় রিমোট সেন্সিং এর বর্তমান এবং সম্ভাব্য প্রয়োগের একটি ওভারভিউ। কম্পিউট ইলেক্ট্রন।
কৃষি। 139, 22-32। https://doi.org/10.1016/j.compag.2017.05.001।
খান্না, এ., কৌর, এস., 2019। ইন্টারনেট অফ থিংস (IoT) এর বিবর্তন এবং যথার্থ কৃষি ক্ষেত্রে এর উল্লেখযোগ্য প্রভাব। কম্পিউট ইলেক্ট্রন। কৃষি। 157, 218-231।
Kim, W., Khan, GF, Wood, J., Mahmood, MT, 2016. টেকসই প্রতিষ্ঠানের জন্য কর্মচারী নিযুক্তি: সামাজিক নেটওয়ার্ক বিশ্লেষণ এবং বিস্ফোরণ ব্যবহার করে কীওয়ার্ড বিশ্লেষণ
সনাক্তকরণ পদ্ধতি। স্থায়িত্ব 8 (7), 631।
Kirsch, M., Lorenz, S., Zimmermann, R., Tusa, L., Mockel, ¨ R., Hodl, ¨ P., Booysen, R., Khodadadzadeh, M., Gloaguen, R., 2018. ইন্টিগ্রেশন স্থলজ এবং ড্রোন-বাহিত
অন্বেষণ ম্যাপিং এবং খনির পর্যবেক্ষণের জন্য হাইপারস্পেকট্রাল এবং ফটোগ্রামমেট্রিক সেন্সিং পদ্ধতি। রিমোট সেন্সিং 10 (9), 1366. https://doi.org/10.3390/
rs10091366।
Kitano, BT, Mendes, CCT, Geus, AR, Oliveira, HC, Souza, JR, 2019. গভীর শিক্ষা এবং UAV ছবি ব্যবহার করে ভুট্টা গাছ গণনা। আইইইই জিওসি। রিমোট সেন্স। 1-5 https://doi.org/10.1109/LGRS.2019.2930549।
Koh, JCO, Spangenberg, G., Kant, S., 2021. হাইথ্রুপুট ইমেজ-ভিত্তিক প্ল্যান্ট ফিনোটাইপিংয়ের জন্য স্বয়ংক্রিয় মেশিন লার্নিং। রিমোট সেন্সিং 13 (5), 858. https://
doi.org/10.3390/rs13050858।
কোভালেভ, IV, ভোরোশিলোভা, AA, 2020। কার্গো ইউএভির বাস্তুতন্ত্রের উন্নয়নে আধুনিক প্রযুক্তিগত প্রবণতা। জে. ফিজ। কনফ. সার্। 1515 (5), 052068 https://doi. org/10.1088/1742-6596/1515/5/052068।
Krul, S., Pantos, C., Frangulea, M., Valente, J., 2021. একটি মনোকুলার ক্যামেরা সহ একটি ছোট ড্রোন ব্যবহার করে অভ্যন্তরীণ পশুসম্পদ এবং কৃষিকাজের জন্য ভিজ্যুয়াল SLAM: একটি সম্ভাব্যতা অধ্যয়ন৷
ড্রোন 5 (2), 41। https://doi.org/10.3390/drones5020041।
Kulbacki, M., Segen, J., Knie´c, W., Klempous, R., Kluwak, K., Nikodem, J., Kulbacka, J., Serester, A., 2018. কৃষি অটোমেশনের জন্য ড্রোনের সমীক্ষা রোপণ থেকে
ফসল. ইন: INES 2018 – IEEE 22 তম ইন্টারন্যাশনাল কনফারেন্স অন ইন্টেলিজেন্ট ইঞ্জিনিয়ারিং সিস্টেম, pp. 000353–358৷ https://doi.org/10.1109/INES.2018.8523943।
Lagkas, T., Argyriou, V., Bibi, S., Sarigiannidis, P., 2018. UAV IoT কাঠামোর দৃষ্টিভঙ্গি এবং চ্যালেঞ্জ: ড্রোনকে "জিনিস" হিসাবে রক্ষা করার দিকে। সেন্সর 18 (11), 4015। https://doi.org/10.3390/s18114015।
Laliberte, AS, Rango, A., 2011. শুষ্ক উপর একটি মনুষ্যবিহীন বিমানের মাধ্যমে অর্জিত সাব-ডেসিমিটার চিত্র বিশ্লেষণের জন্য চিত্র প্রক্রিয়াকরণ এবং শ্রেণিবিন্যাস পদ্ধতি
রেঞ্জল্যান্ডস GISci. রিমোট সেন্স। 48 (1), 4-23। https://doi.org/10.2747/1548-1603.48.1.4।
Laliberte, AS, Rango, A., Herrick, JE, 2007. রেঞ্জল্যান্ড ম্যাপিং এবং মনিটরিংয়ের জন্য মানবহীন বায়বীয় যান: দুটি সিস্টেমের তুলনা। ASPRS বার্ষিক সম্মেলনের কার্যক্রম।
Lam, OHY, Dogotari, M., Prüm, M., Vithlani, HN, Roers, C., Melville, B., Zimmer, F., Becker, R., 2021. নেটিভ তৃণভূমিতে আগাছা ম্যাপিংয়ের জন্য একটি ওপেন সোর্স ওয়ার্কফ্লো
মনুষ্যবিহীন বায়বীয় যান ব্যবহার: কেস স্টাডি হিসাবে রুমেক্স অবটুসিফোলিয়াস ব্যবহার করা। ইউরো. J. Remote Sens. 54 (sup1), 71–88. https://doi.org/10.1080/22797254.2020.1793687।
Lambert, DM, Lowenberg-DeBoer, J., Griffin, TW, Peone, J., Payne, T., Daberkow, SG, 2004. দত্তক গ্রহণ, লাভজনকতা, এবং নির্ভুল কৃষি তথ্যের আরও ভাল ব্যবহার।
কাজ কাগজ. পারডু বিশ্ববিদ্যালয়. https://doi.org/10.22004/ag.econ.28615।
Lelong, CCD, Burger, P., Jubelin, G., Roux, B., Labb'e, S., Baret, F., 2008. ছোট প্লটে গম ফসলের পরিমাণগত পর্যবেক্ষণের জন্য মনুষ্যবিহীন বায়বীয় যানের চিত্রের মূল্যায়ন। সেন্সর 8 (5), 3557–3585। https://doi.org/10.3390/s8053557।
Li, C., Niu, B., 2020। বিগ ডাটা এবং ইন্টারনেট অফ থিংসের উপর ভিত্তি করে স্মার্ট এগ্রিকালচারের ডিজাইন। int. জে ডিস্ট্রিব। সেন্স. নেটওয়ার্ক 16 (5) ttps://doi.org/10.1177/1550147720917065।
Li, W., Niu, Z., Chen, H., Li, D., Wu, M., Zhao, W., 2016. একটি থেকে উচ্চ-রেজোলিউশন স্টেরিও ইমেজ ব্যবহার করে ভুট্টার ছাউনির উচ্চতা এবং উপরের মাটির বায়োমাসের দূরবর্তী অনুমান কম খরচে মনুষ্যবিহীন বায়বীয় যানবাহন ব্যবস্থা। ইকোল। ইন্ড. 67, 637-648। https://doi.org/10.1016/j.ecolind.2016.03.036।
Liakos, KG, Busato, P., Moshou, D., Pearson, S., Bochtis, D., 2018. কৃষিতে মেশিন লার্নিং: একটি পর্যালোচনা। সেন্সর 18 (8), 2674।
Liebisch, F., Kirchgessner, N., Schneider, D., Walter, A., Hund, A., 2015. একটি মোবাইল মাল্টি-সেন্সর পদ্ধতির সাথে ভুট্টার বৈশিষ্ট্যের দূরবর্তী, বায়বীয় ফেনোটাইপিং। উদ্ভিদ পদ্ধতি 11 (1), 9. https://doi.org/10.1186/s13007-015-0048-8।
লিন, জেড., গুও, ডব্লিউ., 2020। মনুষ্যবিহীন বায়বীয় সিস্টেমের ছবি এবং গভীর শিক্ষা ব্যবহার করে সোরঘাম প্যানিকেল সনাক্তকরণ এবং গণনা। সামনে। উদ্ভিদ বিজ্ঞান. 11.
Liu, S., Guo, L., Webb, H., Ya, X., Chang, X., 2019. ইন্টারনেট অফ থিংস মনিটরিং সিস্টেম আধুনিক ইকো-কৃষি ক্লাউড কম্পিউটিং এর উপর ভিত্তি করে। IEEE অ্যাক্সেস 7, 37050–37058।
Lopez-Granados, ´F., 2011. সাইট-নির্দিষ্ট আগাছা ব্যবস্থাপনার জন্য আগাছা সনাক্তকরণ: ম্যাপিং এবং রিয়েল-টাইম পন্থা। আগাছা Res. 51 (1), 1-11। https://doi.org/10.1111/j.1365-3180.2010.00829.x
লোপেজ-গ্রানাডোস, ´এফ., টরেস-সানচেজ, ´ জে., ডি কাস্ত্রো, এ.-আই., সেরানো-পেরেজ, এ., মেসাসকারাসকোসা, এফ.-জে., পেনা, ˜ জে.-এম. , 2016. উচ্চ রেজোলিউশন ইউএভি চিত্র ব্যবহার করে ঘাস ফসলে ঘাসের আগাছার অবজেক্ট-ভিত্তিক প্রাথমিক পর্যবেক্ষণ। এগ্রন। টিকিয়ে রাখা। দেব। 36 (4), 1-12
Lopez-Granados, ´F., Torres-S´ anchez, J., Serrano-P´erez, A., de Castro, AI, MesasCarrascosa, F.-J., Pena, ˜ J.-M., 2016। ইউএভি প্রযুক্তি ব্যবহার করে সূর্যমুখীতে প্রারম্ভিক ঋতু আগাছা ম্যাপিং: আগাছা থ্রেশহোল্ডের বিরুদ্ধে হার্বিসাইড চিকিত্সা মানচিত্রগুলির পরিবর্তনশীলতা। যথার্থ। কৃষি। 17 (2), 183-199।
Lucieer, A., Malenovský, Z., Veness, T., Wallace, L., 2014. HyperUAS - একটি মাল্টিরোটার মানবহীন বিমান সিস্টেম থেকে ইমেজিং স্পেকট্রোস্কোপি। জে. ফিল্ড রব। 31 (4),
571-590। https://doi.org/10.1002/rob.21508।
লুমে, জে., কারজালাইনেন, এম., কার্টিনেন, এইচ., কুক্কো, এ., হাইপ্পা, ¨ জে., হাইপ্প¨ এ, এইচ., জাক্কোলা, এ., এবং ক্লীমোলা, জে., 2008. টেরেস্ট্রিয়াল লেজার স্ক্যানিং কৃষি ফসল। জেজেতে
চেন জে. মাস এইচ-জি (সম্পাদনা), ইন্টারন্যাশনাল আর্কাইভস অফ দ্য ফটোগ্রামমেট্রি, রিমোট সেন্সিং অ্যান্ড স্প্যাশিয়াল ইনফরমেশন সায়েন্সেস-আইএসপিআরএস আর্কাইভস (খণ্ড 37, পিপি। 563-566)।
ইন্টারন্যাশনাল সোসাইটি ফর ফটোগ্রামমেট্রি এবং রিমোট সেন্সিং। https://www.scopus .com/inward/record.uri?eid=2-s2.0-84919356328&partnerID=40&md5=574
b802131a99d16318ce619a01ca1bf.
Ma, L., Li, M., Ma, X., Cheng, L., Du, P., Liu, Y., 2017. তত্ত্বাবধানে অবজেক্ট-ভিত্তিক ভূমি-কভার চিত্র শ্রেণীবিভাগের পর্যালোচনা। আইএসপিআরএস জে ফটোগ্রাম। রিমোট সেন্স। 130,
277-293। https://doi.org/10.1016/j.isprsjprs.2017.06.001।
Maes, WH, Steppe, K., 2019. নির্ভুল কৃষিতে মনুষ্যবিহীন বায়বীয় যানবাহনের সাথে রিমোট সেন্সিং এর দৃষ্টিভঙ্গি। প্রবণতা উদ্ভিদ বিজ্ঞান. 24 (2), 152-164। https://doi.org/10.1016/j.tplants.2018.11.007।
মাইমাইটিজিয়াং, এম., গুলাম, এ., সিডিকে, পি., হার্টলিং, এস., মাইমাইটিইমিং, এম., পিটারসন, কে., শেভার্স, ই., ফিশম্যান, জে., পিটারসন, জে., কদম, এস., Burken, J., Fritschi, F., 2017।
মাল্টি-সেন্সর ডেটা ফিউশন এবং এক্সট্রিম লার্নিং মেশিন ব্যবহার করে সয়াবিনের মানহীন এরিয়াল সিস্টেম (ইউএএস)-ভিত্তিক ফেনোটাইপিং। আইএসপিআরএস জে ফটোগ্রাম। রিমোট সেন্স। 134, 43-58। https://doi.org/10.1016/j.isprsjprs.2017.10.011। Maimaitijiang, M., Sagan, V., Sidike, P., Daloye, AM, Erkbol, H., Fritschi, FB, 2020।
স্যাটেলাইট/ইউএভি ডেটা ফিউশন এবং মেশিন লার্নিং ব্যবহার করে ফসল পর্যবেক্ষণ। রিমোট সেন্সিং 12 (9), 1357। https://doi.org/10.3390/rs12091357।
Manfreda, S., McCabe, M., Miller, P., Lucas, R., Pajuelo Madrigal, V., Mallinis, G., Ben Dor, E., Helman, D., Estes, L., Ciraolo, G. ., Müllerova, ´ J., Tauro, F., de Lima, M., de
লিমা, জে., মাল্টিজ, এ., ফ্রান্সেস, এফ., কেলর, কে., কোহভ, এম., পারক্স, এম., রুইজ-পেরেজ, জি., সু, জেড., ভিকো, জি., টথ , বি., 2018. জন্য মানবহীন বায়বীয় সিস্টেম ব্যবহার
পরিবেশগত পর্যবেক্ষণ. রিমোট সেন্সিং 10 (4), 641।
Marinko, RA, 1998. প্রবন্ধ, 1989 এবং দ্য সিরিয়ালস লাইব্রেরিয়ান 35 (1-2), 29-44-এ মহিলাদের গবেষণা জার্নালের উদ্ধৃতি। https://doi.org/10.1300/J123v35n01_
03.
মাসরুর, আর., নাঈম, এম., এজাজ, ডব্লিউ., 2021। ইউএভি-সহায়তা ওয়্যারলেস নেটওয়ার্কে রিসোর্স ম্যানেজমেন্ট: একটি অপ্টিমাইজেশান দৃষ্টিকোণ। অ্যাডহক নেটওয়ার্ক। 121, 102596 https://doi.org/10.1016/j.adhoc.2021.102596।
Matese, A., Di Gennaro, SF, 2018. মাল্টিস্পেকট্রাল, থার্মাল এবং আরজিবি উচ্চ রেজোলিউশন ইমেজ নির্ভুলতার উপর ভিত্তি করে একটি মাল্টিসেন্সর ইউএভি প্ল্যাটফর্মের ব্যবহারিক অ্যাপ্লিকেশন
ভিটিকালচার কৃষি 8 (7), 116। https://doi.org/10.3390/agriculture8070116।
Matese, A., Di Gennaro, SF, 2021. প্রথাগত এনডিভিআই সূচকের বাইরে স্পষ্টতা ভিটিকালচারে ইউএভি-এর ব্যবহার মূলধারার একটি মূল কারণ হিসেবে। বিজ্ঞান প্রতিনিধি 11 (1), 2721। https://doi.org/10.1038/s41598-021-81652-3।
Matese, A., Toscano, P., Di Gennaro, SF, Genesio, L., Vaccari, FP, Primicerio, J., Belli, C., Zaldei, A., Bianconi, R., Gioli, B., 2015 UAV, বিমানের আন্তঃতুলনা
এবং নির্ভুল ভিটিকালচারের জন্য স্যাটেলাইট রিমোট সেন্সিং প্ল্যাটফর্ম। রিমোট সেন্সিং 7 (3), 2971–2990। https://doi.org/10.3390/rs70302971।
Mazzia, V., Comba, L., Khaliq, A., Chiaberge, M., Gay, P., 2020. নির্ভুলতার জন্য একটি উপগ্রহ-চালিত গাছপালা সূচকের UAV এবং মেশিন লার্নিং ভিত্তিক পরিমার্জন
কৃষি সেন্সর 20 (9), 2530। https://doi.org/10.3390/s20092530।
ম্যাককেইন, কেডব্লিউ, 1990. বুদ্ধিজীবী স্থানের ম্যাপিং লেখক: একটি প্রযুক্তিগত ওভারভিউ। জে. এ.এম. সমাজ তথ্য বিজ্ঞান 41 (6), 433–443।
Meinen, BU, Robinson, DT, 2021. কৃষি ক্ষয় মডেলিং: UAV সময়-সিরিজ ডেটা ব্যবহার করে USLE এবং WEPP ক্ষেত্রের-স্কেল ক্ষয় অনুমান মূল্যায়ন। পরিবেশ। মডেল। সফ্টওয়্যার 137, 104962। https://doi.org/10.1016/j.envsoft.2021.104962।
Melville, B., Lucieer, A., Aryal, J., 2019. হাইপারস্পেকট্রাল আনম্যানড এয়ারক্রাফ্ট সিস্টেম (UAS) চিত্রাবলী ব্যবহার করে নিম্নভূমির স্থানীয় তৃণভূমি সম্প্রদায়ের শ্রেণীবিভাগ
তাসমানিয়ান মিডল্যান্ডস। ড্রোন 3 (1), 5।
মেসিনা, জি., মোডিকা, জি., 2020। নির্ভুল কৃষিতে UAV তাপীয় চিত্রের প্রয়োগ: শিল্পের অবস্থা এবং ভবিষ্যতের গবেষণা দৃষ্টিভঙ্গি। রিমোট সেন্সিং 12 (9), https://doi.org/10.3390/rs12091491।
Mishra, D., Luo, Z., Jiang, S., Papadopoulos, T., Dubey, R., 2017. বড় তথ্যের উপর একটি গ্রন্থপঞ্জী গবেষণা: ধারণা, প্রবণতা এবং চ্যালেঞ্জ। ব্যবসায়িক প্রক্রিয়া ব্যবস্থাপনা। জে. 23 (3),
555-573।
Mochida, K., Saisho, D., Hirayama, T., 2015. ক্ষেত্রের অবস্থার অধীনে অর্জিত জীবন চক্র ডেটাসেট ব্যবহার করে ফসলের উন্নতি। সামনে। উদ্ভিদ বিজ্ঞান. 6 https://doi.org/10.3389/
fpls.2015.00740.
Mogili, UM.R., Deepak, BBVL, 2018. নির্ভুল কৃষিতে ড্রোন সিস্টেমের প্রয়োগের উপর পর্যালোচনা। Procedia Comput. বিজ্ঞান 133, 502-509।
মোহরানা, এস., দত্ত, এস., 2016। হাইপারস্পেকট্রাল চিত্র থেকে ধানের ক্লোরোফিল এবং নাইট্রোজেন সামগ্রীর স্থানিক পরিবর্তনশীলতা। আইএসপিআরএস জে ফটোগ্রাম। রিমোট সেন্স। 122, 17-29।
মুয়াংপ্রথুব, জে., বুননাম, এন., কাজোর্নকাসিরাত, এস., লেকব্যাংপং, এন., ওয়ানিচসোম্বাট, এ.,
নিল্লার, পি., 2019. স্মার্ট ফার্মের জন্য আইওটি এবং কৃষি তথ্য বিশ্লেষণ। কম্পিউট ইলেক্ট্রন। কৃষি। 156, 467-474।
Nansen, C., Elliott, N., 2016. কীটতত্ত্বে রিমোট সেন্সিং এবং প্রতিফলন প্রোফাইলিং। আন্নু। রেভ. এন্টোমল। 61 (1), 139-158। https://doi.org/10.1146/annurev-ento010715-023834।
Navia, J., Mondragon, I., Patino, D., Colorado, J., 2016. কৃষিতে মাল্টিস্পেকট্রাল ম্যাপিং: একটি স্বায়ত্তশাসিত কোয়াডকপ্টার ইউএভি ব্যবহার করে ভূখণ্ডের মোজাইক। int. কনফ.
মনুষ্যবিহীন বিমান সিস্ট। (ICUAS) 2016, 1351–1358। https://doi.org/10.1109/ ICUAS.2016.7502606।
Nayyar, A., Nguyen, B.-L., Nguyen, NG, 2020. ড্রোন জিনিসের ইন্টারনেট (Iodt): স্মার্ট ড্রোনের ভবিষ্যত কল্পনা। অ্যাড. বুদ্ধি। সিস্ট কম্পিউট 1045, 563-580। https://doi.org/10.1007/978-981-15-0029-9_45।
Nebiker, S., Annen, A., Scherrer, M., Oesch, D., 2008. মাইক্রো UAV-এর জন্য একটি হালকা-ওজন মাল্টিস্পেকট্রাল সেন্সর—খুব উচ্চ রেজোলিউশনের বায়ুবাহিত রিমোট সেন্সিংয়ের সুযোগ। int. খিলান। ফটোগ্রাম। রিমোট সেন্স। ইনফ. Sci 37 (B1), 1193–1200।
Negash, L., Kim, H.-Y., Choi, H.-L., 2019. কৃষিতে উদীয়মান UAV অ্যাপ্লিকেশন। ইন: 2019 রোবট বুদ্ধিমত্তা প্রযুক্তি এবং 7 তম আন্তর্জাতিক সম্মেলন
অ্যাপ্লিকেশন (RiTA), pp. 254–257। https://doi.org/10.1109/RITAPP.2019.8932853।
Nerur, SP, Rasheed, AA, Natarajan, V., 2008. কৌশলগত ব্যবস্থাপনা ক্ষেত্রের বৌদ্ধিক কাঠামো: একজন লেখক সহ-উদ্ধৃতি বিশ্লেষণ। কৌশল। মানগ। জে. ২৯ (৩),
319-336।
Neupane, K., Baysal-Gurel, F., 2021. চালকবিহীন বায়বীয় যান ব্যবহার করে উদ্ভিদ রোগের স্বয়ংক্রিয় সনাক্তকরণ এবং পর্যবেক্ষণ: একটি পর্যালোচনা। রিমোট সেন্সিং 13 (19), 3841। https://doi.org/10.3390/rs13193841।
Nex, F., Remondino, F., 2014. 3D ম্যাপিং অ্যাপ্লিকেশনের জন্য UAV: একটি পর্যালোচনা। আবেদন জিওম্যাটিক্স 6 (1), 1-15। https://doi.org/10.1007/s12518-013-0120-x।
Niu, H., Hollenbeck, D., Zhao, T., Wang, D., Chen, Y., 2020. নির্ভুল কৃষিতে ছোট UAVs সহ বাষ্পীভূতকরণ অনুমান। সেন্সর 20 (22), 6427। https://
doi.org/10.3390/s20226427।
Osareh, F., 1996. Bibliometrics, Citation Analysis এবং Co-citation Analysis. সাহিত্যের একটি পর্যালোচনা I 46 (3), 149–158। https://doi.org/10.1515/libr.1996.46.3.149।
P´ adua, L., Vanko, J., Hruˇska, J., Ad˜ ao, T., Sousa, JJ, Peres, E., Morais, R., 2017. UAS, সেন্সর, এবং কৃষি বনবিদ্যায় ডেটা প্রক্রিয়াকরণ: ব্যবহারিক অ্যাপ্লিকেশনের প্রতি একটি পর্যালোচনা। int. জে. রিমোট সেন্স। 38 (8-10), 2349-2391। https://doi.org/10.1080/01431161.2017.1297548।
পান্ডে, ইউএস, প্রতিহাস্ট, AK, আরিয়াল, জে., কায়স্থ, আরবি, 2020। শস্য ফসলের জন্য ড্রোন-ভিত্তিক ডেটা সমাধানের উপর একটি পর্যালোচনা। ড্রোন 4 (3), 1-29। https://doi.org/10.3390/
ড্রোন 4030041।
পার্সিয়ান, এম., শাহাবি, এম., হাসানপুর, এইচ., 2020। ইমেজ প্রসেসিং এবং কৃত্রিম নিউরাল নেটওয়ার্ক ব্যবহার করে তিলের বীজের তেল এবং প্রোটিন সামগ্রীর অনুমান করা। জে. এ.এম. তেল
রসায়নবিদ সমিতি. 97 (7), 691-702।
পেনা, ˜জেএম, টরেস-সানচেজ, জে., ডি কাস্ত্রো, এআই, কেলি, এম., লোপেজ-গ্রানাডোস, এফ., সুয়ারেজ, ও., অবজেক্ট-ভিত্তিক বিশ্লেষণ ব্যবহার করে প্রারম্ভিক মৌসুমের ভুট্টা ক্ষেতে আগাছা ম্যাপিং এর
মনুষ্যবিহীন এরিয়াল ভেহিকল (UAV) ছবি। PLOS ONE 8 (10), e77151।
পেরেজ-অরটিজ, এম., পেনা, ˜ জেএম, গুটিয়েরেজ, পিএ, টরেস-স' অ্যানচেজ, জে., হারভ' অ্যাস-মার্টিনেজ, সি.,
লোপেজ-গ্রানাডোস, ´এফ., 2015। মনুষ্যবিহীন বায়বীয় যান এবং একটি ফসল সারি সনাক্তকরণ পদ্ধতি ব্যবহার করে সূর্যমুখী ফসলে আগাছা ম্যাপিংয়ের জন্য একটি আধা-তত্ত্বাবধান করা সিস্টেম। আবেদন সফট কম্পিউট। জে. 37, 533-544। https://doi.org/10.1016/j.asoc.2015.08.027।
Pincheira, M., Vecchio, M., Giaffreda, R., Kanhere, SS, 2021. নির্ভুল কৃষিতে ব্লকচেইন-ভিত্তিক জল ব্যবস্থাপনা সিস্টেমের জন্য বিশ্বস্ত ডেটা উত্স হিসাবে খরচ-কার্যকর IoT ডিভাইসগুলি। কম্পিউট ইলেক্ট্রন। কৃষি। 180, 105889।
Popescu, D., Stoican, F., Stamatescu, G., Ichim, L., Dragana, C., 2020. নির্ভুল কৃষিতে বুদ্ধিমান পর্যবেক্ষণের জন্য উন্নত UAV-WSN সিস্টেম। সেন্সর 20 (3), https://doi.org/10.3390/s20030817।
Pournader, M., Shi, Y., Seuring, S., Koh, SL, 2020. সাপ্লাই চেইন, ট্রান্সপোর্ট এবং লজিস্টিকসে ব্লকচেইন অ্যাপ্লিকেশন: সাহিত্যের একটি পদ্ধতিগত পর্যালোচনা। int. জে. প্রোড. Res. 58 (7), 2063-2081।
Primicerio, J., Di Gennaro, SF, Fiorillo, E., Genesio, L., Lugato, E., Matese, A., Vaccari, FP, 2012. নির্ভুল কৃষির জন্য একটি নমনীয় মানবহীন বায়বীয় যান।
যথার্থ। কৃষি। 13 (4), 517-523। https://doi.org/10.1007/s11119-012-9257-6।
প্রিচার্ড, এ., 1969. পরিসংখ্যানগত গ্রন্থপঞ্জি বা গ্রন্থপঞ্জি। জে ডকুমেন্ট। 25 (4), 348–349।
Pudelko, R., Stuczynski, T., Borzecka-Walker, M., 2012. পরীক্ষামূলক ক্ষেত্র এবং ফসলের মূল্যায়নের জন্য একটি মানববিহীন বায়বীয় যান (UAV) এর উপযুক্ততা। কৃষি 99 (4), 431–436।
Puri, V., Nayyar, A., Raja, L., 2017. কৃষি ড্রোন: নির্ভুল কৃষিতে একটি আধুনিক অগ্রগতি। জে স্ট্যাটিস। মানগ। সিস্ট 20 (4), 507-518।
Radoglou-Grammatikis, P., Sarigiannidis, P., Lagkas, T., Moscholios, I., 2020. নির্ভুল কৃষির জন্য UAV অ্যাপ্লিকেশনের একটি সংকলন। কম্পিউট Netw. 172,
107148 https://doi.org/10.1016/j.comnet.2020.107148।
Ramesh, KV, Rakesh, V., Prakasa Rao, EVS, 2020. কৃষি গবেষণায় বড় ডেটা বিশ্লেষণ এবং কৃত্রিম বুদ্ধিমত্তার প্রয়োগ। ভারতীয় জে. এগ্রন। 65 (4), 383–395।
Raparelli, E., Bajocco, S., 2019. কৃষি ও বনবিদ্যা গবেষণায় মানবহীন বায়বীয় যানের ব্যবহারের উপর একটি গ্রন্থপঞ্জি বিশ্লেষণ। int. জে. রিমোট সেন্স। 40 (24),
9070-9083। https://doi.org/10.1080/01431161.2019.1569793।
Rasmussen, J., Nielsen, J., Garcia-Ruiz, F., Christensen, S., Streibig, JC, Lotz, B., 2013.
আগাছা গবেষণায় ছোট মানববিহীন বিমান ব্যবস্থার (UAS) সম্ভাব্য ব্যবহার। আগাছা Res. 53 (4), 242-248।
Rasmussen, J., Ntakos, G., Nielsen, J., Svensgaard, J., Poulsen, RN, Christensen, S., ভোক্তা-গ্রেড ক্যামেরা থেকে উদ্ভূত উদ্ভিদ সূচক
পরীক্ষামূলক প্লট মূল্যায়নের জন্য UAV যথেষ্ট নির্ভরযোগ্য? ইউরো. J. Agron. 74, 75-92। https://doi.org/10.1016/j.eja.2015.11.026।
Rejeb, A., Rejeb, K., Abdollahi, A., Zailani, S., Iranmanesh, M., Ghobakhloo, M., 2022. খাদ্য সরবরাহ শৃঙ্খলে ডিজিটালাইজেশন: একটি বিবলিওমেট্রিক পর্যালোচনা এবং মূল-রুট প্রধান পথ
বিশ্লেষণ স্থায়িত্ব 14 (1), 83. https://doi.org/10.3390/su14010083।
Rejeb, A., Rejeb, K., Simske, SJ, Treiblmaier, H., 2021a. সাপ্লাই চেইন ম্যানেজমেন্ট এবং লজিস্টিকসের জন্য ড্রোন: একটি পর্যালোচনা এবং গবেষণা এজেন্ডা। int. J. লজিস্ট Res. আবেদন
1-24। https://doi.org/10.1080/13675567.2021.1981273।
Rejeb, A., Rejeb, K., Simske, S., Treiblmaier, H., 2021b. লজিস্টিক এবং সাপ্লাই চেইন ম্যানেজমেন্টে ব্লকচেইন প্রযুক্তি: একটি বিবলিওমেট্রিক পর্যালোচনা। লজিস্টিকস 5 (4), 72।
https://doi.org/10.3390/logistics5040072.
Rejeb, A., Rejeb, K., Simske, S., Treibmaier, H., 2021c. মানবিক ড্রোন: একটি পর্যালোচনা এবং গবেষণা এজেন্ডা। ইন্টারনেট অফ থিংস 16, 100434। https://doi.org/10.1016/j।
iot.2021.100434.
Rejeb, A., Treibmaier, H., Rejeb, K., Zailani, S., 2021d. স্বাস্থ্যসেবাতে ব্লকচেইন গবেষণা: একটি বিবলিওমেট্রিক পর্যালোচনা এবং বর্তমান গবেষণা প্রবণতা। ডেটা, ইনফের জে. এবং
মানগ। 3 (2), 109-124।
Rejeb, A., Simske, S., Rejeb, K., Treiblmaier, H., Zailani, S., 2020. ইন্টারনেট অফ থিংস রিসার্চ ইন সাপ্লাই চেইন ম্যানেজমেন্ট অ্যান্ড লজিস্টিকস: একটি বিবলিওমেট্রিক বিশ্লেষণ। ইন্টারনেট
বিষয় 12, 100318.
ReportLinker, 2021. গ্লোব এগ্রিকালচার ড্রোনস মার্কেট 15.2 বিলিয়ন মার্কিন ডলারে পৌঁছবে ইয়ারগ্লোবনিউজওয়্যার নিউজ রুম। https://www.globenewswire.com/news-release/2021/08/10/2277986/0/en/Global-Agriculture-Drones-Market-to-Reach-US-15-2-Billion-by-the- বছর-2027.html।
Ribeiro-Gomes, K., Hernandez-L ´opez, ´D., Ortega, JF, Ballesteros, R., Poblete, T., Moreno, MA, 2017. Uncooled থার্মাল ক্যামেরা ক্রমাঙ্কন এবং অপ্টিমাইজেশান
কৃষিতে UAV অ্যাপ্লিকেশনের জন্য ফটোগ্রামমেট্রি প্রক্রিয়া। সেন্সর (সুইজারল্যান্ড) 17 (10)। https://doi.org/10.3390/s17102173।
রিভেরা, এমএ, পিজাম, এ., 2015। আতিথেয়তা গবেষণায় অগ্রগতি: "রডনি ডেঞ্জারফিল্ড থেকে অ্যারেথা ফ্র্যাঙ্কলিন"। int. জে. সমসাময়িক। হাসপাতাল। মানগ। 27 (3),
362–378. https://doi.org/10.1108/IJCHM-03-2014-0146.
Roldan, ´ JJ, Joossen, G., Sanz, D., Del Cerro, J., Barrientos, A., 2015. গ্রীনহাউসে পরিবেশগত পরিবর্তনগুলি পরিমাপের জন্য Mini-UAV ভিত্তিক সংবেদনশীল সিস্টেম। সেন্সর 15 (2), 3334–3350। https://doi.org/10.3390/s150203334।
Rozenberg, G., Kent, R., Blank, L., 2021. ভোক্তা-গ্রেড ইউএভি বাণিজ্যিক পেঁয়াজ ক্ষেতে শেষ-ঋতু আগাছা স্থানিক বন্টনের ধরণ সনাক্তকরণ এবং বিশ্লেষণের জন্য ব্যবহৃত হয়। যথার্থ। কৃষি। 22 (4), 1317-1332। https://doi.org/10.1007/s11119-021-09786-y।
Saari, H., Pellikka, I., Pesonen, L., Tuominen, S., Heikkila, ¨ J., Holmlund, C., Makynen, ¨ J., Ojala, K., Antila, T., 2011. মানবহীন এরিয়াল ভেহিকেল (UAV) চালিত বর্ণালী ক্যামেরা সিস্টেম বন এবং কৃষি অ্যাপ্লিকেশনের জন্য। এগিয়ে যান। SPIE - int. সমাজ অপট ইঞ্জি. 8174 https://doi.org/10.1117/12.897585।
সাহ, বি., গুপ্তা, আর., বানি-হানি, ডি., 2021। ড্রোন লজিস্টিক বাস্তবায়নে বাধার বিশ্লেষণ। int. J. লজিস্ট Res. আবেদন 24 (6), 531-550। https://doi.org/10.1080/
13675567.2020.1782862.
Saha, AK, Saha, J., Ray, R., Sircar, S., Dutta, S., চট্টোপাধ্যায়, SP, & Saha, HN, IOT-ভিত্তিক ড্রোন কৃষিক্ষেত্রে ফসলের মান উন্নয়নের জন্য। এসএইচ-এ
এন. চক্রবর্তী এস. (সম্পাদনা), 2018 IEEE 8ম বার্ষিক কম্পিউটিং এবং কমিউনিকেশন ওয়ার্কশপ এবং সম্মেলন, CCWC 2018 (Vols. 2018-January, pp. 612–615)। ইনস্টিটিউট
ইলেকট্রিক্যাল অ্যান্ড ইলেকট্রনিক্স ইঞ্জিনিয়ার্স ইনকর্পোরেটেডের doi: 10.1109/CCWC.2018.8301662।
সাই ভিনেথ, কেভি, ভারা প্রসাদ, ওয়াইআর, দুবে, এসআর, ভেঙ্কটারমন, এইচ., 2019। LEDCOM: নির্ভুল কৃষির জন্য একটি অভিনব এবং দক্ষ LED ভিত্তিক যোগাযোগ। IEEE কনফ. তথ্য কমুন টেকনোল। 2019, 1-5। https://doi.org/10.1109/CICT48419.2019.9066177।
Salamí, E., Barrado, C., Pastor, E., 2014. UAV ফ্লাইট পরীক্ষাগুলি উদ্ভিজ্জ এলাকার দূরবর্তী অনুধাবনে প্রয়োগ করা হয়েছে। রিমোট সেন্সিং 6 (11), 11051–11081। https://doi.org/10.3390/rs61111051।
Sankaran, S., Khot, LR, Espinoza, CZ, Jarolmasjed, S., Sathuvalli, VR, Vandemark, GJ, Miklas, PN, Carter, AH, Pumphrey, MO, Knowles, NRN, Pavek, MJ, 2015।
সারি এবং ক্ষেত্রের ফসল ফেনোটাইপিংয়ের জন্য নিম্ন-উচ্চতা, উচ্চ-রেজোলিউশন এরিয়াল ইমেজিং সিস্টেম: একটি পর্যালোচনা। ইউরো. J. Agron. 70, 112-123। https://doi.org/10.1016/j
eja.2015.07.004.
Santesteban, LG, Di Gennaro, SF, Herrero-Langreo, A., Miranda, C., Royo, JB, Matese, A., 2017. অনুমান করার জন্য উচ্চ-রেজোলিউশন UAV-ভিত্তিক থার্মাল ইমেজিং
একটি দ্রাক্ষাক্ষেত্রের মধ্যে উদ্ভিদ জলের অবস্থার তাত্ক্ষণিক এবং ঋতু পরিবর্তনশীলতা। কৃষি। ওয়াটার ম্যানাগ। 183, 49-59। https://doi.org/10.1016/j.agwat.2016.08.026।
Sarli, CC, Dubinsky, EK, Holmes, KL, 2010. উদ্ধৃতি বিশ্লেষণের বাইরে: গবেষণা প্রভাবের মূল্যায়নের জন্য একটি মডেল। জে মেড. লাইব্রেরি অ্যাসোসিয়েশন। : JMLA 98 (1), 17–23। https://doi.org/10.3163/1536-5050.98.1.008।
Schaepman, ME, Ustin, SL, Plaza, AJ, Painter, TH, Verrelst, J., Liang, S., 2009. আর্থ সিস্টেম বিজ্ঞান সম্পর্কিত ইমেজিং স্পেকট্রোস্কোপি-একটি মূল্যায়ন। রিমোট সেন্স। পরিবেশ। 113, S123–S137।
Schirrmann, M., Giebel, A., Gleiniger, F., Pflanz, M., Lentschke, J., Dammer, K.-H., 2016. কম খরচে UAV সহ শীতকালীন গম ফসলের কৃষিগত পরামিতি পর্যবেক্ষণ করা
চিত্রাবলী. রিমোট সেন্সিং 8 (9)। https://doi.org/10.3390/rs8090706।
Schmale III, DG, Dingus, BR, Reinholtz, C., 2008. উপরে সুনির্দিষ্ট বায়বীয় নমুনার জন্য একটি স্বায়ত্তশাসিত মানবহীন বায়বীয় যানের বিকাশ এবং প্রয়োগ
কৃষিক্ষেত্র জে. ফিল্ড রব। 25 (3), 133-147। https://doi.org/10.1002/rob.20232।
শাদ্রিন, ডি., মেনশিকভ, এ., সোমভ, এ., বোর্নম্যান, জি., হাউসলেজ, জে., ফেদোরভ, এম.,
কৃত্রিম বুদ্ধিমত্তা সহ এমবেডেড সেন্সিংয়ের মাধ্যমে নির্ভুল কৃষি সক্ষম করা। IEEE ট্রান্স। যন্ত্র। মেস। 69 (7), 4103–4113।
শাখাত্রেহ, এইচ., সাওয়ালমেহ, এএইচ, আল-ফুকাহা, এ., দো, জেড., আলমাইতা, ই., খলিল, আই.,
Othman, NS, Khreishah, A., Guizani, M., 2019. Unmanned এরিয়াল ভেহিকল (UAVs): সিভিল অ্যাপ্লিকেশন এবং মূল গবেষণা চ্যালেঞ্জগুলির উপর একটি সমীক্ষা। IEEE অ্যাক্সেস 7,
৪৮৫৭২–৪৮৬৩৪। https://doi.org/48572/ACCESS.48634।
Shakoor, N., Northrup, D., Murray, S., Mockler, TC, 2019. বিগ ডেটা চালিত কৃষি: উদ্ভিদ প্রজননে বড় ডেটা বিশ্লেষণ, জিনোমিক্স, এবং রিমোট সেন্সিং ব্যবহার
ফসলের উৎপাদনশীলতা বাড়াতে প্রযুক্তি। প্ল্যান্ট ফেনোম জে. 2 (1), 1-8।
শর্মা, বিকে, চন্দ্র, জি., মিশ্র, ভিপি, 2019। ফরেনসিক তদন্তে UAV এবং AI-এর তুলনামূলক বিশ্লেষণ এবং প্রভাব। ইন: প্রসিডিংস – 2019 অ্যামিটি ইন্টারন্যাশনাল
কৃত্রিম বুদ্ধিমত্তার উপর সম্মেলন। https://doi.org/10.1109/AICAI.2019.8701407।
শর্মা, আর., শিশুদিয়া, এ., গুনাশেকারন, এ., মিন, এইচ., মুনিম, জেডএইচ, 2022। সাপ্লাই চেইন ম্যানেজমেন্টে কৃত্রিম বুদ্ধিমত্তার ভূমিকা: অঞ্চল ম্যাপিং। int. জে.
পণ্য Res. 1-24। https://doi.org/10.1080/00207543.2022.2029611।
Shi, Y., Thomason, JA, Murray, SC, Pugh, NA, Rooney, WL, Shafian, S., Rajan, N., Rouze, G., Morgan, CLS, Neely, HL, Rana, A., Bagavathiannan , এমভি,
Henrickson, J., Bowden, E., Valasek, J., Olsenholler, J., Bishop, MP, Sheridan, R., Putman, EB, Popescu, S., Burks, T., Cope, D., Ibrahim এ., ম্যাককাচেন, বিএফ,
Baltensperger, DD, Avant, RV, Vidrine, M., Yang, C., Zhang, J., 2016. উচ্চ-থ্রুপুট ফেনোটাইপিং এবং কৃষি সংক্রান্ত গবেষণার জন্য মানবহীন বায়বীয় যান। প্লাস ওয়ান
11 (7), e0159781।
Shuai, G., Martinez-Feria, RA, Zhang, J., Li, S., Price, R., Basso, B., 2019. মানহীন বায়বীয় ব্যবহার করে ফলন-স্থিতিশীলতা অঞ্চল জুড়ে ভুট্টার স্ট্যান্ড ভিন্নতা ক্যাপচার করা
যানবাহন (UAV)। সেন্সর 19 (20), 4446। https://doi.org/10.3390/s19204446।
স্মল, এইচ., 1973। বৈজ্ঞানিক সাহিত্যে সহ-উদ্ধৃতি: দুটি নথির মধ্যে সম্পর্কের একটি নতুন পরিমাপ। জে. এ.এম. সমাজ তথ্য বিজ্ঞান 24 (4), 265–269।
Small, H., Rorvig, ME, Lunin, LF, 1999. উদ্ধৃতি ম্যাপিং দ্বারা বিজ্ঞানকে ভিজ্যুয়ালাইজ করা। জে. এ.এম. সমাজ তথ্য বিজ্ঞান 50 (9), 799–813।
Soares, VHA, Ponti, MA, Gonçalves, RA, Campello, RJGB, 2021। বড় চারণভূমি এলাকায় ভূ-অবস্থানীয় বায়বীয় চিত্র সহ বন্যের মধ্যে গবাদি পশু গণনা। কম্পিউট ইলেক্ট্রন। কৃষি। 189, 106354 https://doi.org/10.1016/j.compag.2021.106354।
শ্রীবাস্তব, কে., পান্ডে, পিসি, শর্মা, জেকে, 2020। ইউএভি ব্যবহার করে নির্ভুল কৃষির অ্যাপ্লিকেশনে রুট অপ্টিমাইজেশানের জন্য একটি পদ্ধতি। ড্রোন 4 (3), 58। https://doi.org/ 10.3390/drones4030058।
স্টাফোর্ড, জেভি, 2000। 21 শতকে নির্ভুল কৃষি বাস্তবায়ন। জে এগ্রিক। ইঞ্জি. Res. 76 (3), 267-275।
Su, J., Coombes, M., Liu, C., Guo, L., Chen, W.-H., 2018. মনুষ্যবিহীন বায়বীয় যান ব্যবহার করে রিমোট সেন্সিং ইমেজের মাধ্যমে গমের খরা মূল্যায়ন। 2018 সালে 37তম চীনা নিয়ন্ত্রণ সম্মেলন (CCC)।
Su, J., Liu, C., Coombes, M., Hu, X., Wang, C., Xu, X., Li, Q., Guo, L., Chen, W.-H., 2018। মাল্টিস্পেকট্রাল ইউএভি বায়বীয় চিত্র থেকে শেখার মাধ্যমে গমের হলুদ মরিচা পর্যবেক্ষণ।
কম্পিউট ইলেক্ট্রন। কৃষি। 155, 157-166। https://doi.org/10.1016/j compag.2018.10.017.
Su, Y., Wang, X., 2021. বড় তথ্য দ্বারা স্মার্ট কৃষি নির্মাণের প্রক্রিয়ায় কৃষি অর্থনৈতিক ব্যবস্থাপনার উদ্ভাবন। টেকসই কম্পিউট. ইনফ. সিস্ট 31, 100579 https://doi.org/10.1016/j.suscom.2021.100579।
সুলিভান, ডিজি, ফুলটন, জেপি, শ, জেএন, ব্ল্যান্ড, জিএল, 2007। একটি তুলো ছাউনিতে জলের চাপ সনাক্ত করতে একটি মানবহীন তাপীয় ইনফ্রারেড এরিয়াল সিস্টেমের সংবেদনশীলতা মূল্যায়ন করা। ট্রান্স ASABE 50 (6), 1955-1962।
Sumesh, KC, Ninsawat, S., Som-ard, J., 2021. RGB-ভিত্তিক গাছপালা সূচকের একীকরণ, শস্য পৃষ্ঠের মডেল এবং আখের ফলন অনুমানের জন্য অবজেক্ট-ভিত্তিক ইমেজ বিশ্লেষণ পদ্ধতি মানবহীন বায়বীয় যান ব্যবহার করে। কম্পিউট ইলেক্ট্রন। কৃষি। 180, 105903 https://doi.org/10.1016/j.compag.2020.105903।
সুওমালাইনেন, জে., অ্যান্ডারস, এন., ইকবাল, এস., ফ্রাঙ্ক, জে., ওয়েন্টিং, পি., বার্থোলোমিউস, এইচ., বেকার, আর., কুইস্ট্রা, এল., 2013৷ একটি হালকা ওজনের হাইপারস্পেকট্রাল ম্যাপিং সিস্টেম
মনুষ্যবিহীন বায়বীয় যান-প্রথম ফলাফল। ইন: 2013 হাইপারস্পেকট্রাল ইমেজ এবং সিগন্যাল প্রক্রিয়াকরণের উপর 5 তম কর্মশালা: রিমোট সেন্সিং (হুসপারস), পৃষ্ঠা 1-4। https://doi.org/10.1109/WHISPERS.2013.8080721।
সুওমালাইনেন, জে., অ্যান্ডারস, এন., ইকবাল, এস., রোরিঙ্ক, জি., ফ্রাঙ্ক, জে., ওয়েন্টিং, পি., হানিগার, ডি., বার্থোলোমিউস, এইচ., বেকার, আর., কুইস্ট্রা, এল., 2014. একটি লাইটওয়েট হাইপারস্পেকট্রাল
মানহীন বায়বীয় যানবাহনের জন্য ম্যাপিং সিস্টেম এবং ফটোগ্রামমেট্রিক প্রসেসিং চেইন। রিমোট সেন্সিং 6 (11), 11013–11030। https://doi.org/10.3390/
rs61111013।
সৈয়দা, আইএইচ, আলম, এমএম, ইলাহি, ইউ., সুউদ, এমএম, 2021। কৃষিতে চিত্র প্রক্রিয়াকরণ, ইউএভি এবং এআই ব্যবহার করে অগ্রিম নিয়ন্ত্রণ কৌশল: একটি পর্যালোচনা। বিশ্ব জে. ইঞ্জি. 18 (4),
579–589. https://doi.org/10.1108/WJE-09-2020-0459.
Tahai, A., Rigsby, JT, 1998. অ্যাকাউন্টিংয়ে জার্নাল প্রভাব তদন্ত করতে উদ্ধৃতি ব্যবহার করে তথ্য প্রক্রিয়াকরণ। ইনফ. প্রক্রিয়া পরিচালনা করুন। 34 (2-3), 341-359।
Tang, Y., Dananjayan, S., Hou, C., Guo, Q., Luo, S., He, Y., 2021. 5G নেটওয়ার্কের উপর একটি সমীক্ষা এবং কৃষিতে এর প্রভাব: চ্যালেঞ্জ এবং সুযোগ৷ কম্পিউট
ইলেক্ট্রন। কৃষি। 180, 105895 https://doi.org/10.1016/j.compag.2020.105895।
তানতালাকি, এন., সৌরভলাস, এস., রৌমেলিওটিস, এম., 2019। নির্ভুল কৃষিতে ডেটা-চালিত সিদ্ধান্ত গ্রহণ: কৃষি ব্যবস্থায় বড় ডেটার উত্থান। জে এগ্রিক। খাদ্য তথ্য।
20 (4), 344-380।
Tao, H., Feng, H., Xu, L., Miao, M., Yang, G., Yang, X., Fan, L., 2020. UAV- ব্যবহার করে শীতকালীন গমের ফলন এবং গাছের উচ্চতা অনুমান ভিত্তিক হাইপারস্পেকট্রাল ছবি।
সেন্সর 20 (4), 1231।
Techy, L., Schmale III, DG, Woolsey, CA, 2010. দুটি স্বায়ত্তশাসিত মানবহীন বায়বীয় যান ব্যবহার করে নিম্ন বায়ুমণ্ডলে একটি উদ্ভিদ রোগজীবাণুর সমন্বিত বায়বীয় নমুনা। জে. ফিল্ড রব। 27 (3), 335-343। https://doi.org/10.1002/rob.20335।
Tetila, EC, Machado, BB, Astolfi, G., Belete, NAdS, Amorim, WP, Roel, AR, Pistori, H., 2020. গভীর শিক্ষা ব্যবহার করে সয়াবিনের কীটপতঙ্গ সনাক্তকরণ এবং শ্রেণীবিভাগ
UAV ছবি সহ। কম্পিউট ইলেক্ট্রন। কৃষি। 179, 105836।
Thamm, H.-P., Menz, G., Becker, M., Kuria, DN, Misana, S., Kohn, D., 2013. তানজানিয়ায় AN ওয়েটল্যান্ডে কৃষি ব্যবস্থার মূল্যায়নের জন্য Uas-এর ব্যবহার— এবং টেকসই কৃষির জন্য WetSeason এবং Terra-Sar X ডেটার জন্য গ্রাউন্ড ট্রুথ প্রদান। ইন: আইএসপিআরএস - ফটোগ্রামমেট্রির ইন্টারন্যাশনাল আর্কাইভস, রিমোট সেন্সিং অ্যান্ড স্প্যাশিয়াল ইনফরমেশন সায়েন্সেস, পিপি 401-406। https://doi.org/10.5194/isprsarchivesXL-1-W2-401-2013।
Thelwall, M., 2008. Bibliometrics to webometrics. J. তথ্য। বিজ্ঞান 34 (4), 605-621।
Torres-Sanchez, ´ J., Lopez-Granados, ´ F., Pena, ˜ JM, 2015. UAV ছবিতে সর্বোত্তম থ্রেশহোল্ডিংয়ের জন্য একটি স্বয়ংক্রিয় অবজেক্ট-ভিত্তিক পদ্ধতি: ভেষজ ফসলে গাছপালা সনাক্তকরণের জন্য অ্যাপ্লিকেশন। কম্পিউট ইলেক্ট্রন। কৃষি। 114, 43-52। https://doi.org/10.1016/j.compag.2015.03.019।
Torres-Sanchez, ´J., Lopez-Granados, ´F., Serrano, N., Arquero, O., Pena, ˜ JM, Hassan, QK, 2015. উচ্চ-থ্রুপুট 3-ডি মনিটরিং এর সাথে কৃষি-বৃক্ষ রোপণ মনুষ্যবিহীন এরিয়াল ভেহিকল (ইউএভি) প্রযুক্তি। PLOS ONE 10 (6), e0130479।
Torres-Sanchez, ´ J., Pena, ˜ JM, de Castro, AI, Lopez-Granados, ´ F., 2014. UAV থেকে ছবি ব্যবহার করে প্রারম্ভিক-মৌসুমের গমের ক্ষেতে উদ্ভিদের ভগ্নাংশের বহু-স্থায়ী ম্যাপিং। কম্পিউট ইলেক্ট্রন। কৃষি। 103, 104-113। https://doi.org/10.1016/j compag.2014.02.009.
Tsouros, DC, Bibi, S., Sarigiannidis, PG, 2019. নির্ভুল কৃষির জন্য UAV-ভিত্তিক অ্যাপ্লিকেশনগুলির একটি পর্যালোচনা। তথ্য (সুইজারল্যান্ড) 10 (11)। https://doi.org/10.3390/info10110349।
Tu, Y.-H., Phinn, S., Johansen, K., Robson, A., Wu, D., 2020. উদ্যানপালন গাছ ফসলের গঠন পরিমাপের জন্য ড্রোন ফ্লাইট পরিকল্পনা অপ্টিমাইজ করা। আইএসপিআরএস জে ফটোগ্রাম।
রিমোট সেন্স। 160, 83-96। https://doi.org/10.1016/j.isprsjprs.2019.12.006
Tzounis, A., Katsoulas, N., Bartzanas, T., Kittas, C., 2017. ইন্টারনেট অফ থিংস ইন এগ্রিকালচার, সাম্প্রতিক অগ্রগতি এবং ভবিষ্যতের চ্যালেঞ্জ। বায়োসিস্ট। ইঞ্জি. 164, 31-48।
https://doi.org/10.1016/j.biosystemseng.2017.09.007.
উদ্দিন, এ., সিং, ভিকে, পিন্টো, ডি., ওলমোস, আই., 2015। মেক্সিকোতে কম্পিউটার বিজ্ঞান গবেষণার সায়েন্টমেট্রিক ম্যাপিং। সায়েন্টমেট্রিক্স 105 (1), 97-114।
UN., 2019. বিশ্ব জনসংখ্যার সম্ভাবনা 2019. https://population.un.org/wpp/ (15/04/2022 এ অ্যাক্সেস করা হয়েছে)।
Uto, K., Seki, H., Saito, G., Kosugi, Y., 2013. UAV-মাউন্টেড ক্ষুদ্রাকৃতির হাইপারস্পেকট্রাল সেন্সর সিস্টেম দ্বারা ধানের ধানের বৈশিষ্ট্য। IEEE J. Sel. শীর্ষ. আবেদন আর্থ Obs.
রিমোট সেন্স। 6 (2), 851–860। https://doi.org/10.1109/JSTARS.2013.2250921। van der Merwe, D., Burchfield, DR, Witt, TD, Price, KP, Sharda, A., 2020. ড্রোন
কৃষি অ্যাড. এগ্রন। 162, 1-30।
ভেলুসামি, পি., রাজেন্দ্রন, এস., মহেন্দ্রন, আরকে, নাসির, এস., শফিক, এম., চোই, জে.-জি., 2022।
নির্ভুল কৃষিতে মনুষ্যবিহীন এরিয়াল ভেহিকল (ইউএভি): অ্যাপ্লিকেশন এবং চ্যালেঞ্জ। শক্তি 15 (1), 217। https://doi.org/10.3390/en15010217।
Ventura, D., Bonifazi, A., Gravina, MF, Belluscio, A., Ardizzone, G., 2018. মানহীন বায়বীয় ব্যবহার করে পরিবেশগতভাবে সংবেদনশীল সামুদ্রিক বাসস্থানের ম্যাপিং এবং শ্রেণীবিভাগ
যানবাহন (UAV) চিত্রাবলী এবং অবজেক্ট-ভিত্তিক চিত্র বিশ্লেষণ (OBIA)। রিমোট সেন্সিং 10 (9), 1331। https://doi.org/10.3390/rs10091331।
Verger, A., Vigneau, N., Ch'eron, C., Gilliot, J.-M., Comar, A., Baret, F., 2014. গম এবং রেপসিড ফসলের উপর মানবহীন বায়বীয় ব্যবস্থা থেকে সবুজ এলাকা সূচক . রিমোট সেন্স। পরিবেশ। 152, 654-664। https://doi.org/10.1016/j.rse.2014.06.006।
Von Bueren, SK, Burkart, A., Hueni, A., Rascher, U., Tuohy, MP, Yule, IJ, 2015. তৃণভূমিতে চারটি অপটিক্যাল UAV-ভিত্তিক সেন্সর স্থাপন করা: চ্যালেঞ্জ এবং
সীমাবদ্ধতা বায়োজিওসায়েন্স 12 (1), 163–175। https://doi.org/10.5194/bg-12-163-2015।
Vuran, MC, Salam, A., Wong, R., Irmak, S., 2018. নির্ভুল কৃষিতে ভূগর্ভস্থ জিনিসগুলির ইন্টারনেট: স্থাপত্য এবং প্রযুক্তির দিক। অ্যাডহক নেটওয়ার্ক। ৮১,
160-173। https://doi.org/10.1016/j.adhoc.2018.07.017।
Wamba, SF, Queiroz, MM, 2021। ডিজিটাল স্বাস্থ্যের জন্য একটি গোপন উপাদান হিসাবে দায়িত্বশীল কৃত্রিম বুদ্ধিমত্তা: বাইবলিওমেট্রিক বিশ্লেষণ, অন্তর্দৃষ্টি এবং গবেষণার দিকনির্দেশ।
তথ্য সিস্ট সামনে। 1-16।
Wang, L., Zhang, G., Wang, Z., Liu, J., Shang, J., Liang, L., 2019. শস্য বৃদ্ধি পর্যবেক্ষণে রিমোট সেন্সিং গবেষণা প্রবণতার বিবলিওমেট্রিক বিশ্লেষণ: চীনে একটি কেস স্টাডি৷ রিমোট সেন্সিং 11 (7)। https://doi.org/10.3390/rs11070809।
হোয়াইট, এইচডি, গ্রিফিথ, বিসি, 1981। লেখক কোসিটেশন: বুদ্ধিবৃত্তিক কাঠামোর একটি সাহিত্য পরিমাপ। জে. এ.এম. সমাজ তথ্য বিজ্ঞান 32 (3), 163-171।
Xiang, H., Tian, L., 2011. একটি স্বায়ত্তশাসিত মানবহীন বায়বীয় যান (UAV) এর উপর ভিত্তি করে একটি স্বল্প খরচের কৃষি রিমোট সেন্সিং সিস্টেমের বিকাশ। বায়োসিস্ট। ইঞ্জি. 108 (2), 174-190। https://doi.org/10.1016/j.biosystemseng.2010.11.010।
Xie, C., Yang, C., 2020. UAV-ভিত্তিক সেন্সর ব্যবহার করে উদ্ভিদের উচ্চ-থ্রুপুট ফেনোটাইপিং বৈশিষ্ট্যের উপর একটি পর্যালোচনা। কম্পিউট ইলেক্ট্রন। কৃষি। 178, 105731 https://doi.org/10.1016/j।
compag.2020.105731.
Yao, H., Qin, R., Chen, X., 2019. দূর অনুধাবন অ্যাপ্লিকেশনের জন্য মানববিহীন বায়বীয় যান—একটি পর্যালোচনা। রিমোট সেন্সিং 11 (12)। https://doi.org/10.3390/
rs11121443।
ইয়েওম, এস., 2021। মাল্টিরোটার দ্বারা ইনফ্রারেড থার্মাল ইমেজিং দিয়ে মুভিং লোক ট্র্যাকিং এবং মিথ্যা ট্র্যাক অপসারণ। ড্রোন 5 (3), 65। https://doi.org/10.3390/drones5030065।
Yue, J., Feng, H., Jin, X., Yuan, H., Li, Z., Zhou, C., Yang, G., Tian, Q., 2018. ছবি ব্যবহার করে ফসলের পরামিতি অনুমানের তুলনা UAV-মাউন্ট করা থেকে
স্ন্যাপশট হাইপারস্পেকট্রাল সেন্সর এবং হাই-ডেফিনিশন ডিজিটাল ক্যামেরা। রিমোট সেন্সিং 10 (7), 1138। https://doi.org/10.3390/rs10071138।
Yue, J., Yang, G., Li, C., Li, Z., Wang, Y., Feng, H., Xu, B., 2017. মনুষ্যবিহীন বায়বীয় যান ব্যবহার করে মাটির উপরে শীতকালীন গমের অনুমান- ভিত্তিক স্ন্যাপশট
হাইপারস্পেকট্রাল সেন্সর এবং ফসলের উচ্চতা উন্নত মডেল। রিমোট সেন্সিং 9 (7)। https://doi.org/10.3390/rs9070708।
Zahawi, RA, Dandois, JP, Holl, KD, Nadwodny, D., Reid, JL, Ellis, EC, 2015. গ্রীষ্মমন্ডলীয় বন পুনরুদ্ধারের নিরীক্ষণের জন্য হালকা ওজনের মানবহীন বায়বীয় যানবাহন ব্যবহার করা। বায়োল
সংরক্ষণ করুন। 186, 287-295। https://doi.org/10.1016/j.biocon.2015.03.031। Zamora-Izquierdo, MA, Santa, J., Martínez, JA, Martínez, V., Skarmeta, AF, 2019।
প্রান্ত এবং ক্লাউড কম্পিউটিং এর উপর ভিত্তি করে স্মার্ট ফার্মিং আইওটি প্ল্যাটফর্ম। বায়োসিস্ট। ইঞ্জি. 177,
4-17।
Zarco-Tejada, PJ, Diaz-Varela, R., Angileri, V., Loudjani, P., 2014. একটি মানুষবিহীন বায়বীয় থেকে অর্জিত খুব উচ্চ রেজোলিউশন চিত্র ব্যবহার করে গাছের উচ্চতা পরিমাপ
যানবাহন (UAV) এবং স্বয়ংক্রিয় 3D ফটো পুনর্গঠন পদ্ধতি। ইউরো. J. Agron. 55, 89-99। https://doi.org/10.1016/j.eja.2014.01.004।
Zhang, C., Craine, WA, McGee, RJ, Vandemark, GJ, Davis, JB, Brown, J., Hulbert, SH, Sankaran, S., 2020. শীতল মৌসুমের ফসলে ফুলের তীব্রতার চিত্র-ভিত্তিক ফেনোটাইপিং। সেন্সর 20 (5), 1450। https://doi.org/10.3390/s20051450।
Zhang, C., Kovacs, JM, 2012. নির্ভুল কৃষির জন্য ছোট মানববিহীন বায়বীয় সিস্টেমের প্রয়োগ: একটি পর্যালোচনা। যথার্থ। কৃষি। 13 (6), 693–712। https://doi.org/
10.1007/s11119-012-9274-5.
Zhang, L., Zhang, H., Niu, Y., Han, W., 2019. UAV মাল্টিস্পেকট্রাল রিমোট সেন্সিং এর উপর ভিত্তি করে ভুট্টার জলের চাপের ম্যাপিং। রিমোট সেন্সিং 11 (6), 605।
ঝাং, এক্স., হান, এল., ডং, ওয়াই., শি, ওয়াই., হুয়াং, ডব্লিউ., হান, এল., গনজ' আলেজ-মোরেনো, পি., মা, এইচ., ইয়ে, এইচ., সোবেইহ , T., 2019. স্বয়ংক্রিয় হলুদ মরিচা জন্য একটি গভীর শিক্ষা-ভিত্তিক পদ্ধতি
উচ্চ-রেজোলিউশন হাইপারস্পেকট্রাল UAV ছবি থেকে রোগ সনাক্তকরণ। রিমোট সেন্সিং 11 (13), 1554।
Zhao, X., Zhang, J., Huang, Y., Tian, Y., Yuan, L., 2022. তরঙ্গ বিশ্লেষণের সাথে মিলিত হাইপারস্পেকট্রাল ইমেজিং ব্যবহার করে চা গাছের রোগ এবং কীটপতঙ্গের চাপ সনাক্তকরণ এবং বৈষম্য। কম্পিউট ইলেক্ট্রন। কৃষি। 193, 106717 https://doi.org/10.1016/j। compag.2022.106717.
Zheng, A., Wang, M., Li, C., Tang, J., Luo, B., 2022. এনট্রপি গাইডেড অ্যাডভারসারিয়াল ডোমেন অভিযোজন বায়বীয় চিত্র শব্দার্থিক বিভাজনের জন্য। IEEE ট্রান্স। জি
Zheng, H., Cheng, T., Yao, X., Deng, X., Tian, Y., Cao, W., Zhu, Y., 2016. স্থল-ভিত্তিক বর্ণালীর সময় সিরিজ বিশ্লেষণের মাধ্যমে ধানের ফিনলজি সনাক্তকরণ সূচক তথ্য। মাঠ ফসল রে. 198, 131-139। https://doi.org/10.1016/j.fcr.2016.08.027।
Zheng, J., Yang, W., 2018. ওয়্যারলেস সেন্সরের উপর ভিত্তি করে একটি নির্ভুল কৃষি ফুটো বীজ বপন সিস্টেমের নকশা। int. জে. অনলাইন ইঞ্জি. 14 (05), 184।
Zhou, L., Gu, X., Cheng, S., Yang, G., Shu, M., Sun, Q., 2020. UAV-LiDAR ডেটা ব্যবহার করে ভুট্টার গাছের উচ্চতা পরিবর্তনের বিশ্লেষণ। কৃষি 10 (5), 146. https://
doi.org/10.3390/agriculture10050146।
Zhou, S., Chai, X., Yang, Z., Wang, H., Yang, C., Sun, T., 2021. Maize-IAS: উচ্চ-থ্রুপুট প্ল্যান্ট ফেনোটাইপিংয়ের জন্য গভীর শিক্ষা ব্যবহার করে একটি ভুট্টা ইমেজ বিশ্লেষণ সফ্টওয়্যার . উদ্ভিদ পদ্ধতি 17 (1), 48. https://doi.org/10.1186/s13007-021-00747-0।
Zhou, X., Zheng, HB, Xu, XQ, He, JY, Ge, XK, Yao, X., Cheng, T., Zhu, Y., Cao, WX, Tian, YC, 2017. ভবিষ্যদ্বাণী করা শস্যের ফলন মাল্টি-টেম্পোরাল গাছপালা ব্যবহার করে চাল
UAV-ভিত্তিক মাল্টিস্পেকট্রাল এবং ডিজিটাল চিত্র থেকে সূচক। আইএসপিআরএস জে ফটোগ্রাম। রিমোট সেন্স। 130, 246-255। https://doi.org/10.1016/j.isprsjprs.2017.05.003।
Zhou, Y., Xie, Y., Shao, L., 2016. একটি ওয়্যারলেস সেন্সর নেটওয়ার্কের উপর ভিত্তি করে একটি গ্রীনহাউস মনিটরিং সিস্টেমের মূল প্রযুক্তির সিমুলেশন। int. জে. অনলাইন ইঞ্জি. 12 (05),
43.
Zhou, Z., Majeed, Y., Diverres Naranjo, G., Gambacorta, EMT, 2021. নির্ভুল কৃষিতে ইনফ্রারেড তাপীয় চিত্র সহ ফসলের জলের চাপের জন্য মূল্যায়ন: একটি পর্যালোচনা
এবং গভীর শিক্ষার অ্যাপ্লিকেশনের জন্য ভবিষ্যতের সম্ভাবনা। কম্পিউট ইলেক্ট্রন। কৃষি। 182, 106019 https://doi.org/10.1016/j.compag.2021.106019।

{kind=link}